

The biomechanics of walking shape the use of visual information during locomotion over complex terrain
- PMID: 25788704
- PMCID: PMC4365914
- DOI: 10.1167/15.3.10
The biomechanics of walking shape the use of visual information during locomotion over complex terrain
Abstract
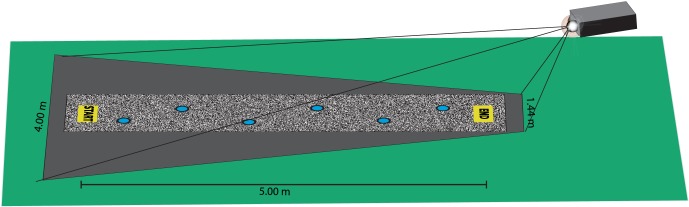
The aim of this study was to examine how visual information is used to control stepping during locomotion over terrain that demands precision in the placement of the feet. More specifically, we sought to determine the point in the gait cycle at which visual information about a target is no longer needed to guide accurate foot placement. Subjects walked along a path while stepping as accurately as possible on a series of small, irregularly spaced target footholds. In various conditions, each of the targets became invisible either during the step to the target or during the step to the previous target. We found that making targets invisible after toe off of the step to the target had little to no effect on stepping accuracy. However, when targets disappeared during the step to the previous target, foot placement became less accurate and more variable. The findings suggest that visual information about a target is used prior to initiation of the step to that target but is not needed to continuously guide the foot throughout the swing phase. We propose that this style of control is rooted in the biomechanics of walking, which facilitates an energetically efficient strategy in which visual information is primarily used to initialize the mechanical state of the body leading into a ballistic movement toward the target foothold. Taken together with previous studies, the findings suggest the availability of visual information about the terrain near a particular step is most essential during the latter half of the preceding step, which constitutes a critical control phase in the bipedal gait cycle.
Keywords: biomechanics; bipedal gait; foot placement; locomotion; visual control.
© 2015 ARVO.
Figures





References
-
- Bauby C. E., Kuo A. D. (2000). Active control of lateral balance in human walking. Journal of Biomechanics , 33 (11), 1433–1440 Retrieved from http://www.ncbi.nlm.nih.gov/pubmed/10940402. - PubMed
-
- Carlton L. G. (1992). Visual processing time and the control of movement. In Proteau L., Elliot D. (Eds.), Vision and motor control (pp 3–31 ) Amsterdam, The Netherlands: Elsevier.
-
- Cavagna G. A., Margaria R. (1966). Mechanics of walking. Journal of Applied Physiology , 21 (1), 271–278. - PubMed
-
- Elliott D., Allard F. (1985). The utilization of visual feedback information during rapid pointing movements. The Quarterly Journal of Experimental Psychology A: Human Experimental Psychology , 37 (3), 407–425. - PubMed
-
- Elliott D., Binsted G., Heath M. (1999). The control of goal-directed limb movements: Correcting errors in the trajectory. Human Movement Science , 18 (2–3), 121–136, doi:10.1016/S0167-9457(99)00004-4. - DOI
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
