

Stride segmentation during free walk movements using multi-dimensional subsequence dynamic time warping on inertial sensor data
- PMID: 25789489
- PMCID: PMC4435165
- DOI: 10.3390/s150306419
Stride segmentation during free walk movements using multi-dimensional subsequence dynamic time warping on inertial sensor data
Abstract
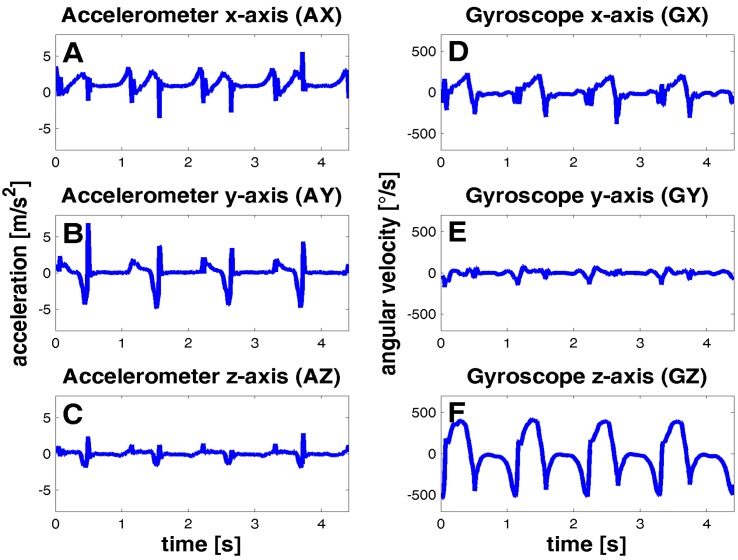
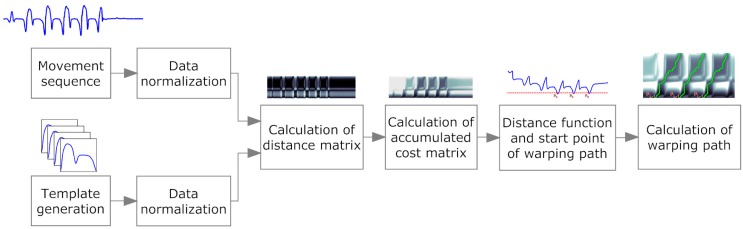
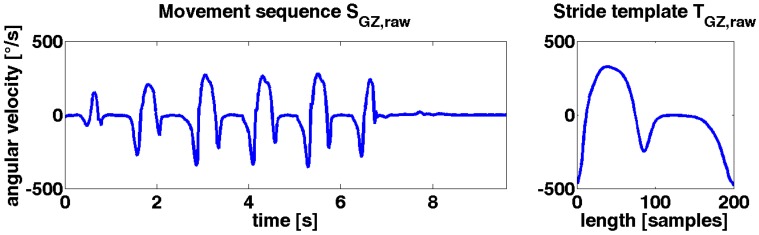
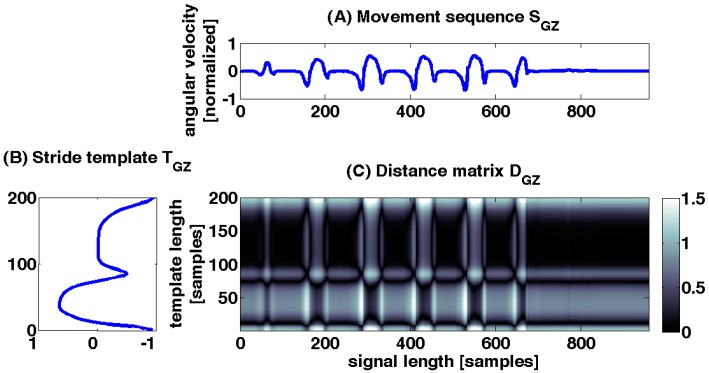
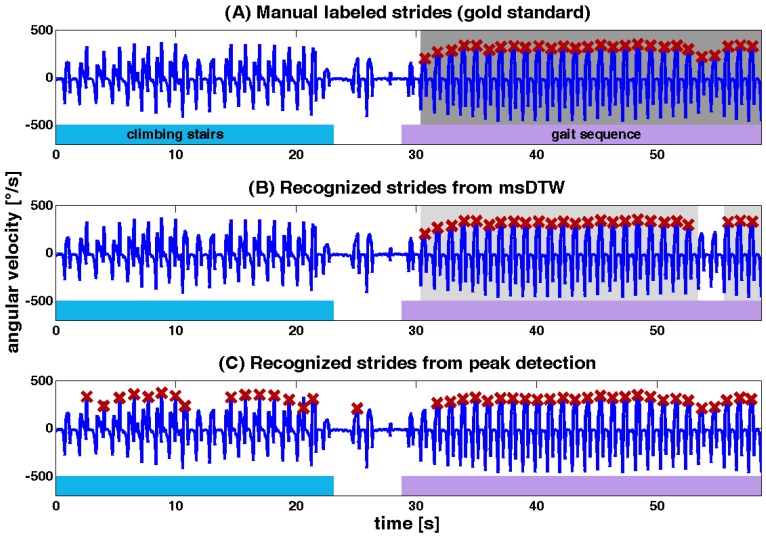
Changes in gait patterns provide important information about individuals' health. To perform sensor based gait analysis, it is crucial to develop methodologies to automatically segment single strides from continuous movement sequences. In this study we developed an algorithm based on time-invariant template matching to isolate strides from inertial sensor signals. Shoe-mounted gyroscopes and accelerometers were used to record gait data from 40 elderly controls, 15 patients with Parkinson's disease and 15 geriatric patients. Each stride was manually labeled from a straight 40 m walk test and from a video monitored free walk sequence. A multi-dimensional subsequence Dynamic Time Warping (msDTW) approach was used to search for patterns matching a pre-defined stride template constructed from 25 elderly controls. F-measure of 98% (recall 98%, precision 98%) for 40 m walk tests and of 97% (recall 97%, precision 97%) for free walk tests were obtained for the three groups. Compared to conventional peak detection methods up to 15% F-measure improvement was shown. The msDTW proved to be robust for segmenting strides from both standardized gait tests and free walks. This approach may serve as a platform for individualized stride segmentation during activities of daily living.
Figures

References
-
- Selles R.W., Formanoy M.A.G., Bussmann J.B.J., Janssens P.J., Stam H.J. Automated estimation of initial and terminal contact timing using accelerometers; development and validation in transtibial amputees and controls. IEEE Trans. Neural Syst. Rehabil. Eng. 2005;13:81–88. doi: 10.1109/TNSRE.2004.843176. - DOI - PubMed
-
- Derawi M.O., Bours P., Holien K. Improved cycle detection for accelerometer based gait authentication; Proceedings of the Sixth International Conference on Intelligent Information Hiding and Multimedia Signal Processing; Darmstadt, Germany. 15–17 October 2010; pp. 312–317.
LinkOut - more resources
Full Text Sources
Other Literature Sources
