

Behavioral modeling of human choices reveals dissociable effects of physical effort and temporal delay on reward devaluation
- PMID: 25816114
- PMCID: PMC4376637
- DOI: 10.1371/journal.pcbi.1004116
Behavioral modeling of human choices reveals dissociable effects of physical effort and temporal delay on reward devaluation
Erratum in
-
Correction: Behavioral Modeling of Human Choices Reveals Dissociable Effects of Physical Effort and Temporal Delay on Reward Devaluation.PLoS Comput Biol. 2017 Feb 27;13(2):e1005401. doi: 10.1371/journal.pcbi.1005401. eCollection 2017 Feb. PLoS Comput Biol. 2017. PMID: 28241040 Free PMC article.
Abstract
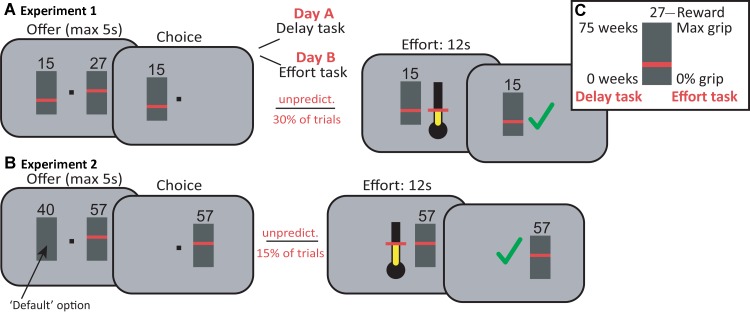
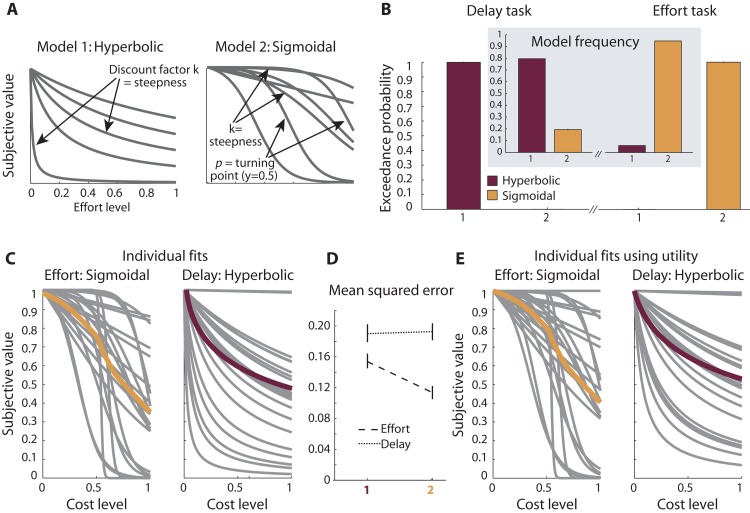
There has been considerable interest from the fields of biology, economics, psychology, and ecology about how decision costs decrease the value of rewarding outcomes. For example, formal descriptions of how reward value changes with increasing temporal delays allow for quantifying individual decision preferences, as in animal species populating different habitats, or normal and clinical human populations. Strikingly, it remains largely unclear how humans evaluate rewards when these are tied to energetic costs, despite the surge of interest in the neural basis of effort-guided decision-making and the prevalence of disorders showing a diminished willingness to exert effort (e.g., depression). One common assumption is that effort discounts reward in a similar way to delay. Here we challenge this assumption by formally comparing competing hypotheses about effort and delay discounting. We used a design specifically optimized to compare discounting behavior for both effort and delay over a wide range of decision costs (Experiment 1). We then additionally characterized the profile of effort discounting free of model assumptions (Experiment 2). Contrary to previous reports, in both experiments effort costs devalued reward in a manner opposite to delay, with small devaluations for lower efforts, and progressively larger devaluations for higher effort-levels (concave shape). Bayesian model comparison confirmed that delay-choices were best predicted by a hyperbolic model, with the largest reward devaluations occurring at shorter delays. In contrast, an altogether different relationship was observed for effort-choices, which were best described by a model of inverse sigmoidal shape that is initially concave. Our results provide a novel characterization of human effort discounting behavior and its first dissociation from delay discounting. This enables accurate modelling of cost-benefit decisions, a prerequisite for the investigation of the neural underpinnings of effort-guided choice and for understanding the deficits in clinical disorders characterized by behavioral inactivity.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
References
-
- Kahneman D, Tversky A. Prospect theory—analysis of decision under risk. Econometrica. 1979;47: 263–291.
-
- Stephens DW, Krebs JR. Foraging Theory Princeton University Press; 1986.
-
- Bateson M, Kacelnik A. Rate currencies and the foraging starling: the fallacy of the averages revisited. Behavioral Ecology. 1996;7: 341–352. 10.1093/beheco/7.3.341 - DOI
-
- Stephens DW, Anderson D. The adaptive value of preference for immediacy: when shortsighted rules have farsighted consequences. Behavioral Ecology. 2001;12: 330–339. 10.1093/beheco/12.3.330 - DOI
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
