

Flexible explicit but rigid implicit learning in a visuomotor adaptation task
- PMID: 25855690
- PMCID: PMC4473515
- DOI: 10.1152/jn.00009.2015
Flexible explicit but rigid implicit learning in a visuomotor adaptation task
Abstract
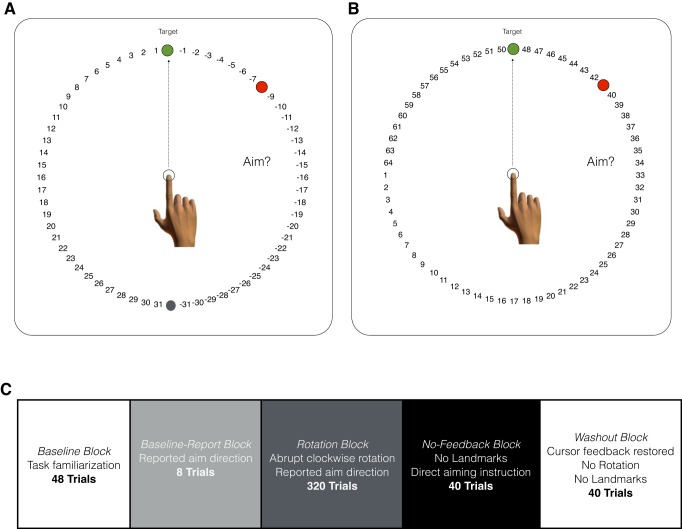
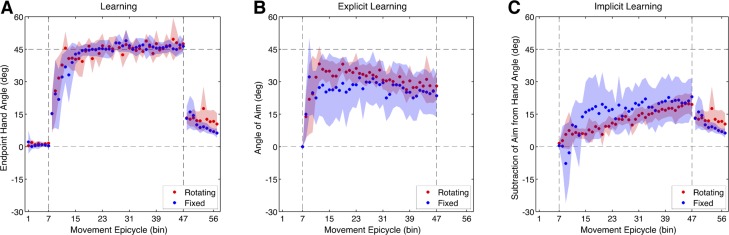
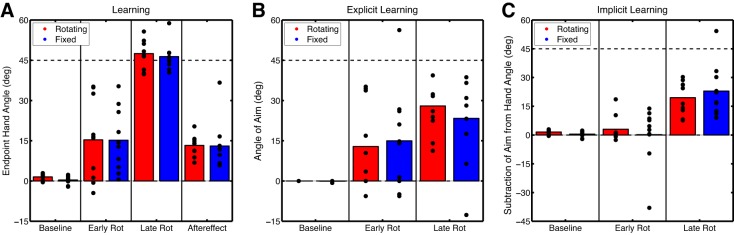
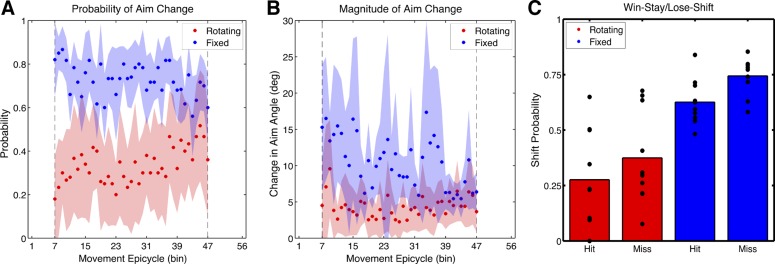
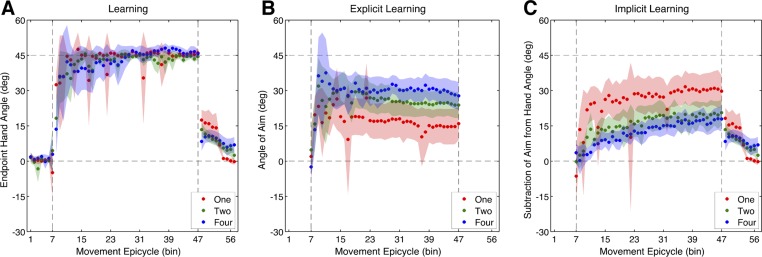
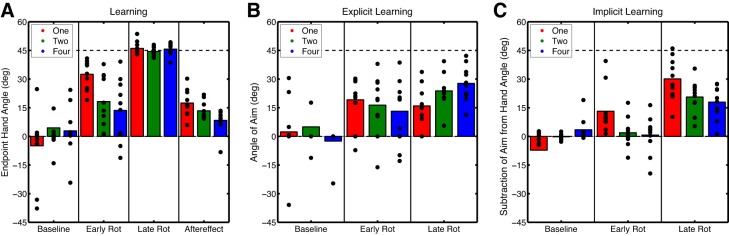
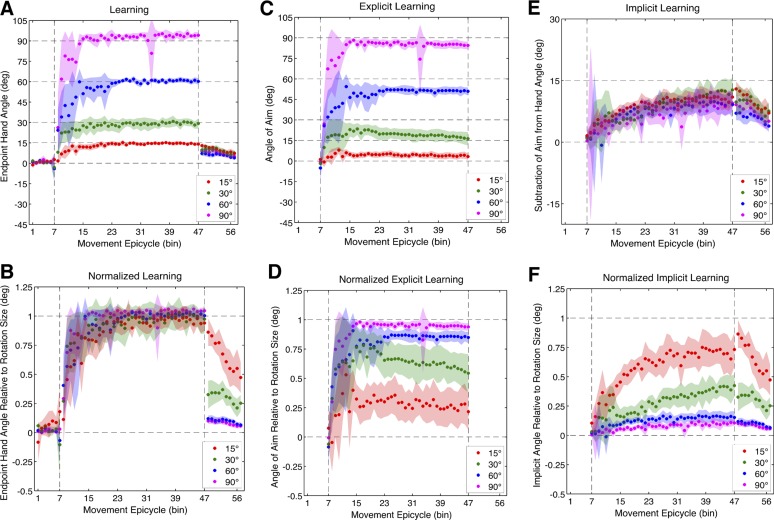
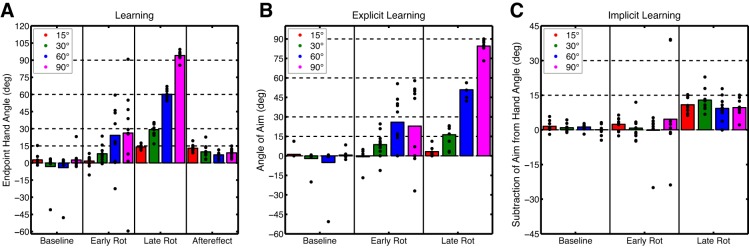
There is mounting evidence for the idea that performance in a visuomotor rotation task can be supported by both implicit and explicit forms of learning. The implicit component of learning has been well characterized in previous experiments and is thought to arise from the adaptation of an internal model driven by sensorimotor prediction errors. However, the role of explicit learning is less clear, and previous investigations aimed at characterizing the explicit component have relied on indirect measures such as dual-task manipulations, posttests, and descriptive computational models. To address this problem, we developed a new method for directly assaying explicit learning by having participants verbally report their intended aiming direction on each trial. While our previous research employing this method has demonstrated the possibility of measuring explicit learning over the course of training, it was only tested over a limited scope of manipulations common to visuomotor rotation tasks. In the present study, we sought to better characterize explicit and implicit learning over a wider range of task conditions. We tested how explicit and implicit learning change as a function of the specific visual landmarks used to probe explicit learning, the number of training targets, and the size of the rotation. We found that explicit learning was remarkably flexible, responding appropriately to task demands. In contrast, implicit learning was strikingly rigid, with each task condition producing a similar degree of implicit learning. These results suggest that explicit learning is a fundamental component of motor learning and has been overlooked or conflated in previous visuomotor tasks.
Keywords: explicit learning; implicit learning; motor adaptation; motor learning; visuomotor rotation.
Copyright © 2015 the American Physiological Society.
Figures
References
-
- Bedford FL. Keeping perception accurate. Trends Cogn Sci 3: 4–11, 1999. - PubMed
-
- Brennan AA, Bakdash JZ, Proffitt DR. Treadmill experience mediates the perceptual-motor aftereffect of treadmill walking. Exp Brain Res 216: 527–534, 2012. - PubMed
-
- Cunningham HA. Aiming error under transformed spatial mappings suggests a structure for visual-motor maps. J Exp Psychol Hum Percept Perform 15: 493–506, 1989. - PubMed
-
- Fine MS, Thoroughman KA. Motor adaptation to single force pulses: sensitive to direction but insensitive to within-movement pulse placement and magnitude. J Neurophysiol 96: 710–720, 2006. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources