

Estimating thumb-index finger precision grip and manipulation potential in extant and fossil primates
- PMID: 25878134
- PMCID: PMC4424698
- DOI: 10.1098/rsif.2015.0176
Estimating thumb-index finger precision grip and manipulation potential in extant and fossil primates
Abstract
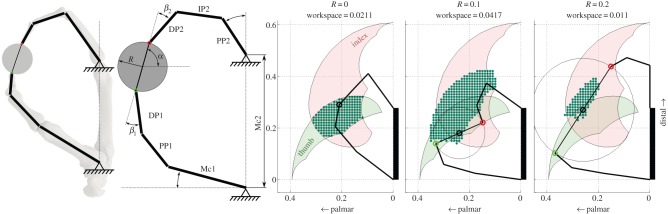
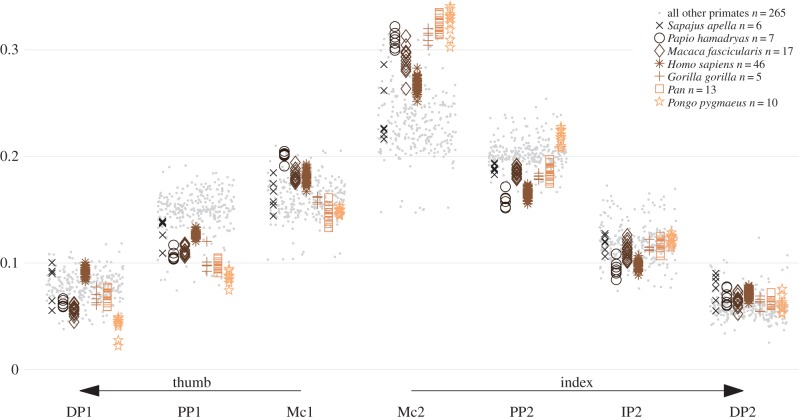
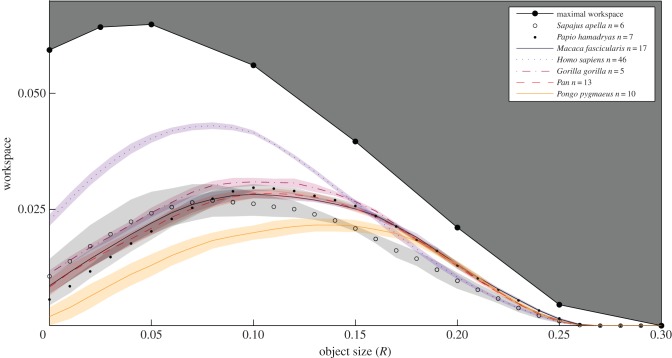
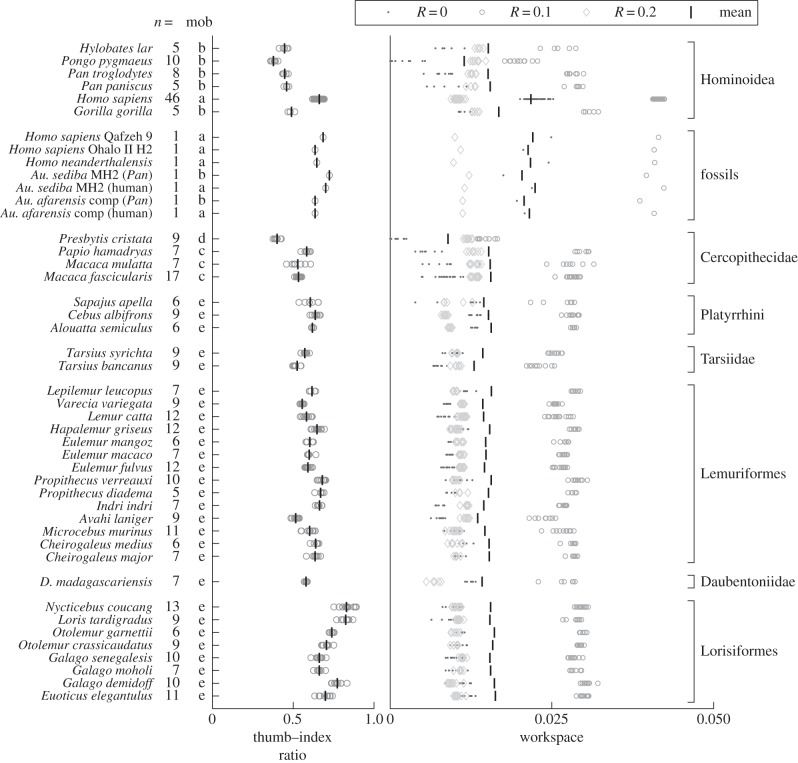
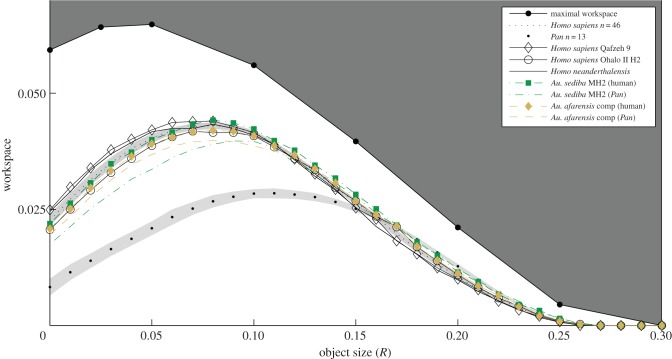
Primates, and particularly humans, are characterized by superior manual dexterity compared with other mammals. However, drawing the biomechanical link between hand morphology/behaviour and functional capabilities in non-human primates and fossil taxa has been challenging. We present a kinematic model of thumb-index precision grip and manipulative movement based on bony hand morphology in a broad sample of extant primates and fossil hominins. The model reveals that both joint mobility and digit proportions (scaled to hand size) are critical for determining precision grip and manipulation potential, but that having either a long thumb or great joint mobility alone does not necessarily yield high precision manipulation. The results suggest even the oldest available fossil hominins may have shared comparable precision grip manipulation with modern humans. In particular, the predicted human-like precision manipulation of Australopithecus afarensis, approximately one million years before the first stone tools, supports controversial archaeological evidence of tool-use in this taxon.
Keywords: Australopithecus; Neanderthal; grasping; kinematic model; manipulation; primates.
© 2015 The Author(s) Published by the Royal Society. All rights reserved.
Figures
Similar articles
-
Morphological affinities of the Australopithecus afarensis hand on the basis of manual proportions and relative thumb length.J Hum Evol. 2003 Feb;44(2):225-54. doi: 10.1016/s0047-2484(02)00207-5. J Hum Evol. 2003. PMID: 12662944
-
The impact of hand proportions on tool grip abilities in humans, great apes and fossil hominins: A biomechanical analysis using musculoskeletal simulation.J Hum Evol. 2018 Dec;125:106-121. doi: 10.1016/j.jhevol.2018.10.001. Epub 2018 Nov 14. J Hum Evol. 2018. PMID: 30502891
-
Early origin for human-like precision grasping: a comparative study of pollical distal phalanges in fossil hominins.PLoS One. 2010 Jul 22;5(7):e11727. doi: 10.1371/journal.pone.0011727. PLoS One. 2010. PMID: 20661444 Free PMC article.
-
Precision grips, hand morphology, and tools.Am J Phys Anthropol. 1997 Jan;102(1):91-110. doi: 10.1002/(SICI)1096-8644(199701)102:1<91::AID-AJPA8>3.0.CO;2-G. Am J Phys Anthropol. 1997. PMID: 9034041 Review.
-
Tool making, hand morphology and fossil hominins.Philos Trans R Soc Lond B Biol Sci. 2013 Oct 7;368(1630):20120414. doi: 10.1098/rstb.2012.0414. Print 2013 Nov 19. Philos Trans R Soc Lond B Biol Sci. 2013. PMID: 24101624 Free PMC article. Review.
Cited by
-
Stress distribution in the bonobo (Pan paniscus) trapeziometacarpal joint during grasping.PeerJ. 2021 Oct 1;9:e12068. doi: 10.7717/peerj.12068. eCollection 2021. PeerJ. 2021. PMID: 34703659 Free PMC article.
-
Hafted technologies likely reduced stone tool-related selective pressures acting on the hominin hand.Sci Rep. 2023 Sep 20;13(1):15582. doi: 10.1038/s41598-023-42096-z. Sci Rep. 2023. PMID: 37730739 Free PMC article.
-
Free hand hitting of stone-like objects in wild gorillas.Sci Rep. 2022 Jul 15;12(1):11981. doi: 10.1038/s41598-022-15542-7. Sci Rep. 2022. PMID: 35840637 Free PMC article.
-
Evolutionary development of the Homo antecessor scapulae (Gran Dolina site, Atapuerca) suggests a modern-like development for Lower Pleistocene Homo.Sci Rep. 2021 Feb 18;11(1):4102. doi: 10.1038/s41598-021-83039-w. Sci Rep. 2021. PMID: 33602966 Free PMC article.
-
Introducing "Validated entheses-Based reconstruction of activity 2.0" (VERA 2.0): Semi-automated 3D analysis of bone surface changes.PLoS One. 2025 Apr 16;20(4):e0321479. doi: 10.1371/journal.pone.0321479. eCollection 2025. PLoS One. 2025. PMID: 40238840 Free PMC article.
References
-
- Wood Jones F. 1916. Arboreal man. London, UK: Edward Arnold.
-
- Napier JR. 1960. Studies of the hands of living primates. Proc. Zool. Soc. London 134, 647–657. (10.1111/j.1469-7998.1960.tb05606.x) - DOI
-
- Napier JR. 1993. Hands. Princeton, NJ: Princeton University Press.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
