

Phenotypic characterization of speed-associated gait changes in mice reveals modular organization of locomotor networks
- PMID: 25959968
- PMCID: PMC4469368
- DOI: 10.1016/j.cub.2015.04.005
Phenotypic characterization of speed-associated gait changes in mice reveals modular organization of locomotor networks
Abstract
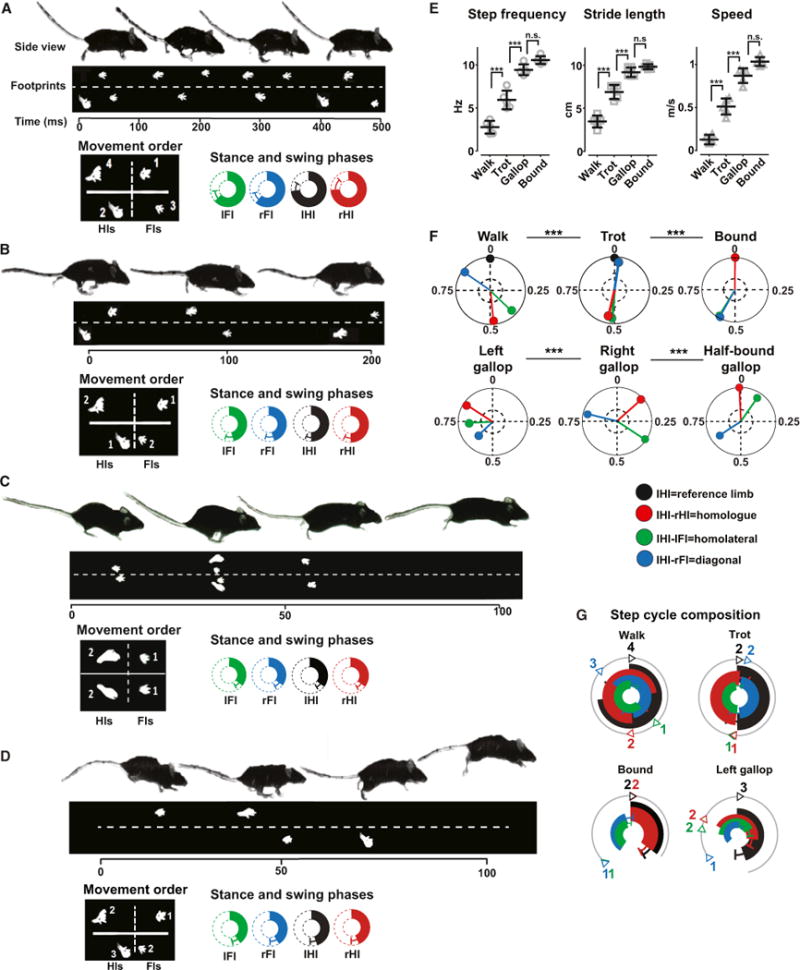
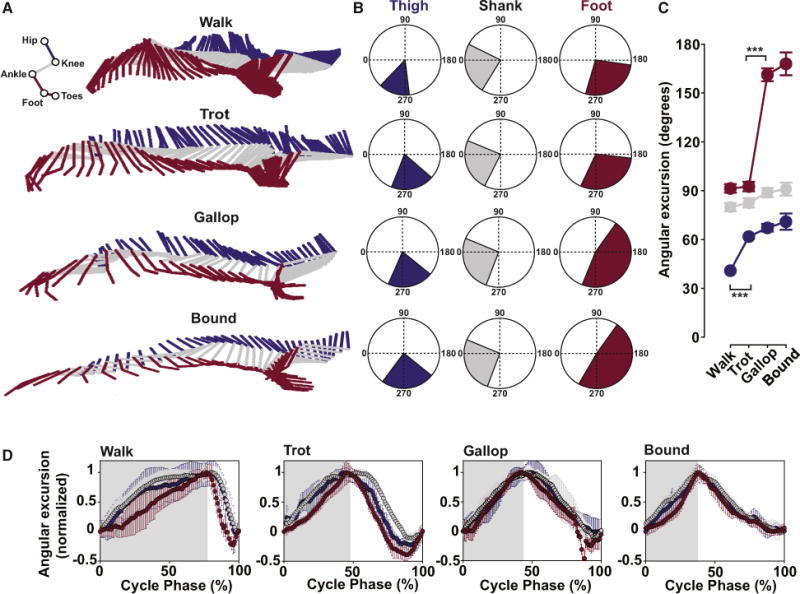
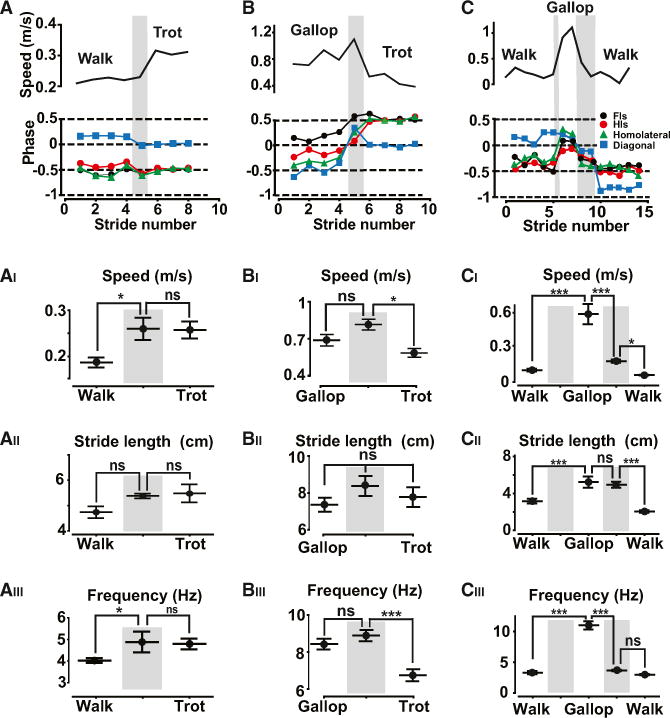
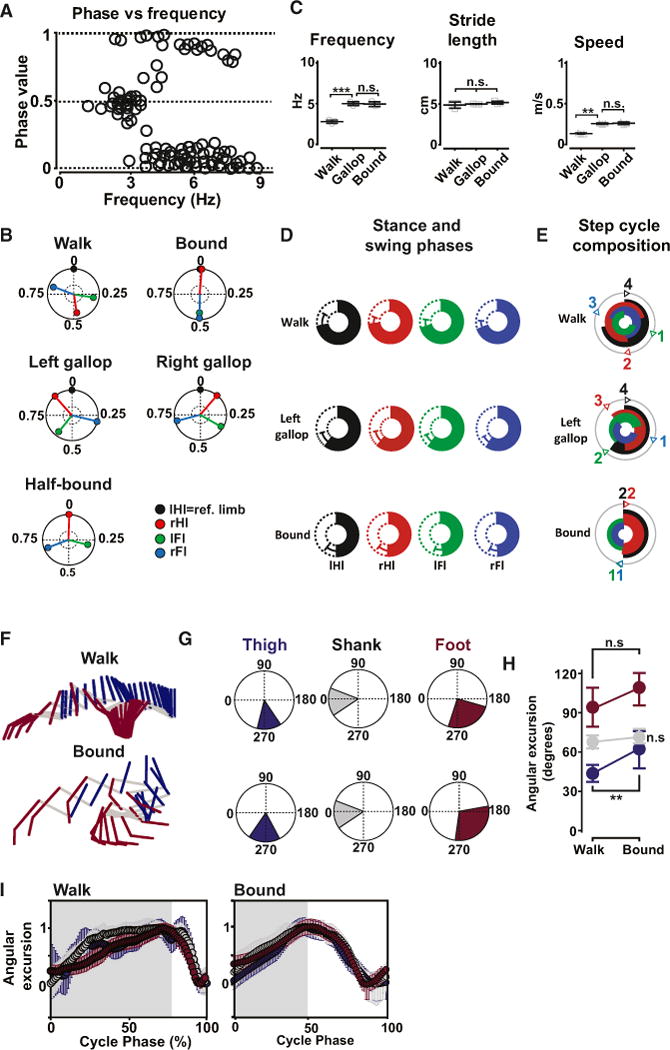
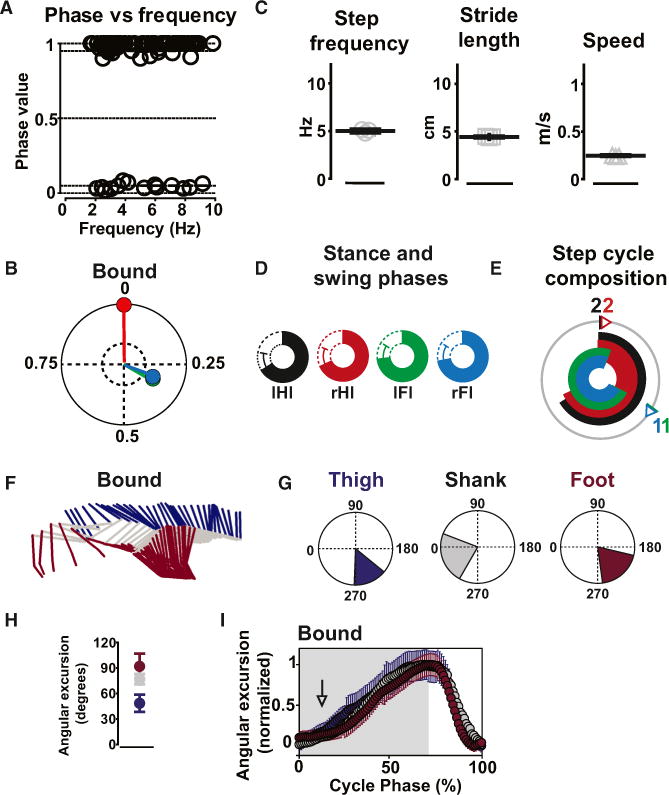
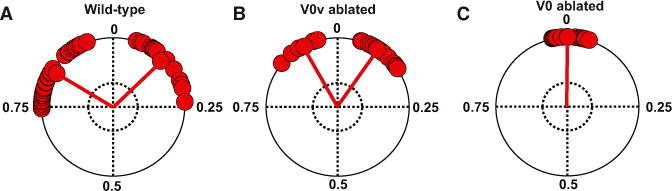
Studies of locomotion in mice suggest that circuits controlling the alternating between left and right limbs may have a modular organization with distinct locomotor circuits being recruited at different speeds. It is not clear, however, whether such a modular organization reflects specific behavioral outcomes expressed at different speeds of locomotion. Here, we use detailed kinematic analyses to search for signatures of a modular organization of locomotor circuits in intact and genetically modified mice moving at different speeds of locomotion. We show that wild-type mice display three distinct gaits: two alternating, walk and trot, and one synchronous, bound. Each gait is expressed in distinct ranges of speed with phenotypic inter-limb and intra-limb coordination. A fourth gait, gallop, closely resembled bound in most of the locomotor parameters but expressed diverse inter-limb coordination. Genetic ablation of commissural V0V neurons completely removed the expression of one alternating gait, trot, but left intact walk, gallop, and bound. Ablation of commissural V0V and V0D neurons led to a loss of walk, trot, and gallop, leaving bound as the default gait. Our study provides a benchmark for studies of the neuronal control of locomotion in the full range of speeds. It provides evidence that gait expression depends upon selection of different modules of neuronal ensembles.
Copyright © 2015 Elsevier Ltd. All rights reserved.
Figures
References
-
- Ampatzis K, Song J, Ausborn J, El Manira A. Separate microcircuit modules of distinct v2a interneurons and motoneurons control the speed of locomotion. Neuron. 2014;83:934–943. - PubMed
-
- Talpalar AE, Bouvier J, Borgius L, Fortin G, Pierani A, Kiehn O. Dual-mode operation of neuronal networks involved in left-right alternation. Nature. 2013;500:85–88. - PubMed
-
- Crone SA, Quinlan KA, Zagoraiou L, Droho S, Restrepo CE, Lundfald L, Endo T, Setlak J, Jessell TM, Kiehn O, Sharma K. Genetic ablation of V2a ipsilateral interneurons disrupts left-right locomotor coordination in mammalian spinal cord. Neuron. 2008;60:70–83. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Molecular Biology Databases
