

Multi-channel EEG recordings during 3,936 grasp and lift trials with varying weight and friction
- PMID: 25977798
- PMCID: PMC4365902
- DOI: 10.1038/sdata.2014.47
Multi-channel EEG recordings during 3,936 grasp and lift trials with varying weight and friction
Abstract
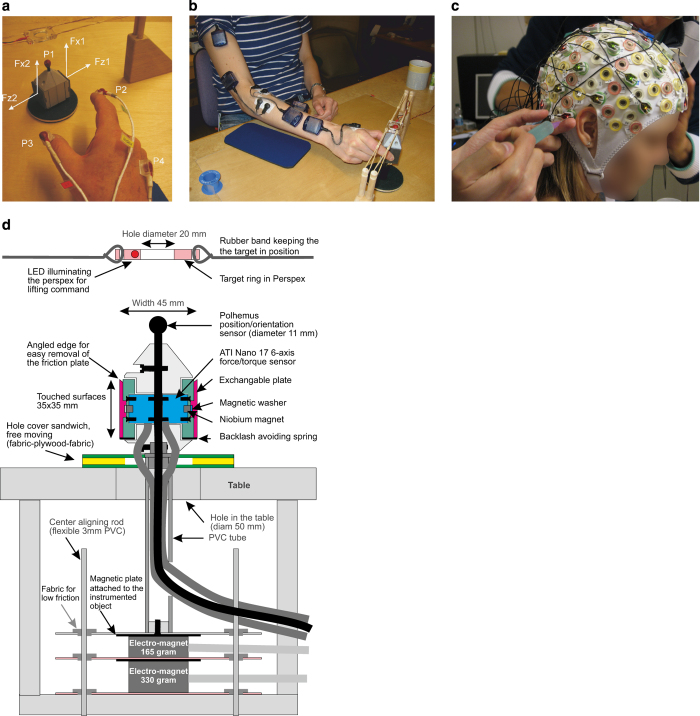
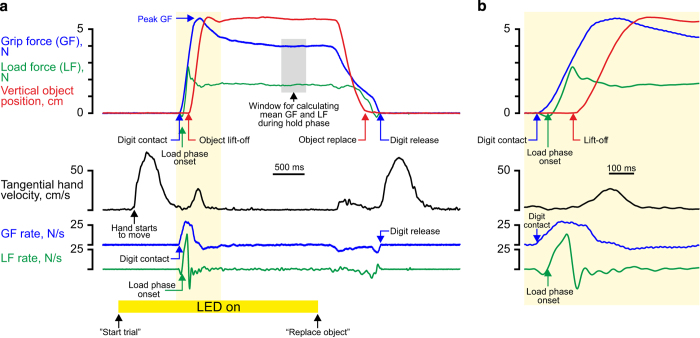
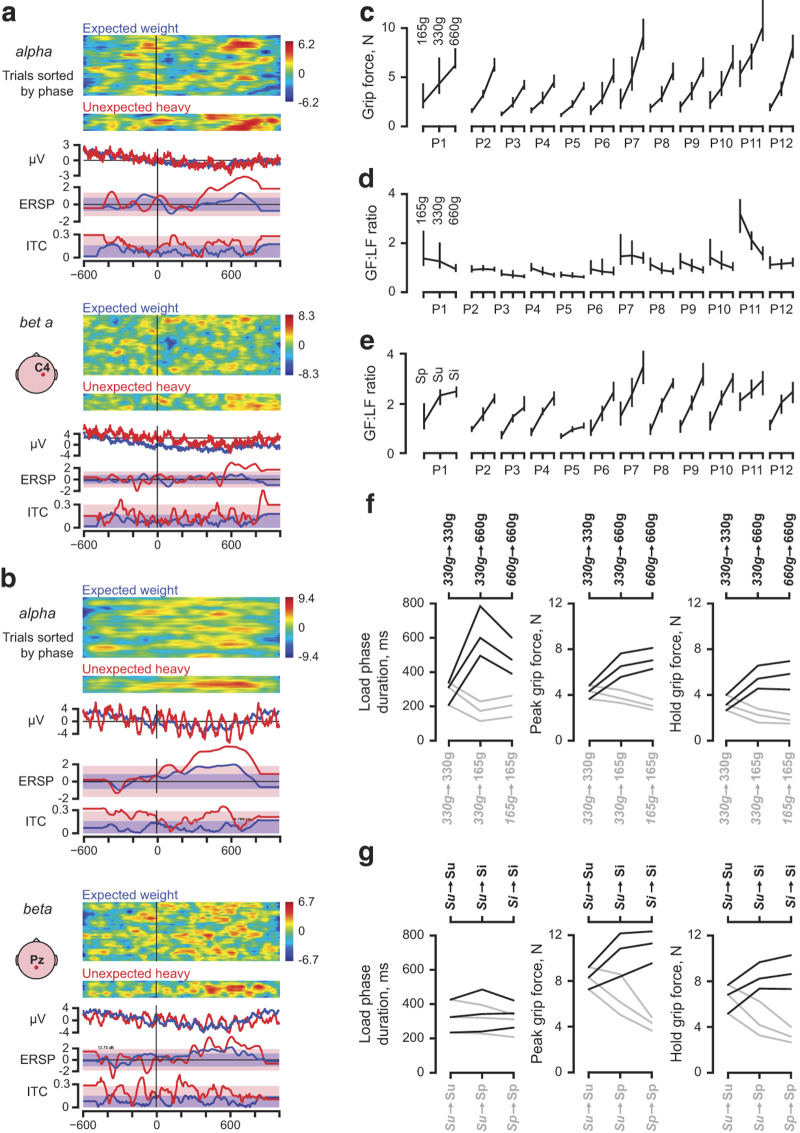
WAY-EEG-GAL is a dataset designed to allow critical tests of techniques to decode sensation, intention, and action from scalp EEG recordings in humans who perform a grasp-and-lift task. Twelve participants performed lifting series in which the object's weight (165, 330, or 660 g), surface friction (sandpaper, suede, or silk surface), or both, were changed unpredictably between trials, thus enforcing changes in fingertip force coordination. In each of a total of 3,936 trials, the participant was cued to reach for the object, grasp it with the thumb and index finger, lift it and hold it for a couple of seconds, put it back on the support surface, release it, and, lastly, to return the hand to a designated rest position. We recorded EEG (32 channels), EMG (five arm and hand muscles), the 3D position of both the hand and object, and force/torque at both contact plates. For each trial we provide 16 event times (e.g., 'object lift-off') and 18 measures that characterize the behaviour (e.g., 'peak grip force').
Conflict of interest statement
The authors declare no competing financial interests.
Figures
References
Data Citations
-
- Luciw M. D., Jarocka E., Edin B. B. 2014. Figshare. http://dx.doi.org/10.6084/m9.figshare.988376 - DOI - PMC - PubMed
References
-
- Ehrsson H. H. et al. Cortical activity in precision versus power-grip tasks: an fMRI study. J. Neurophysiol. 83, 528–536 (2000). - PubMed
-
- Westling G. & Johansson R. S. Factors influencing the force control during precision grip. Exp. Brain Res. 53, 277–284 (1984). - PubMed
-
- Johansson R. S. & Westling G. Programmed and triggered actions to rapid load changes during precision grip. Exp. Brain Res. 71, 72–86 (1988). - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
