

An Integration Factor Method for Stochastic and Stiff Reaction-Diffusion Systems
- PMID: 25983341
- PMCID: PMC4430728
- DOI: 10.1016/j.jcp.2015.04.028
An Integration Factor Method for Stochastic and Stiff Reaction-Diffusion Systems
Abstract
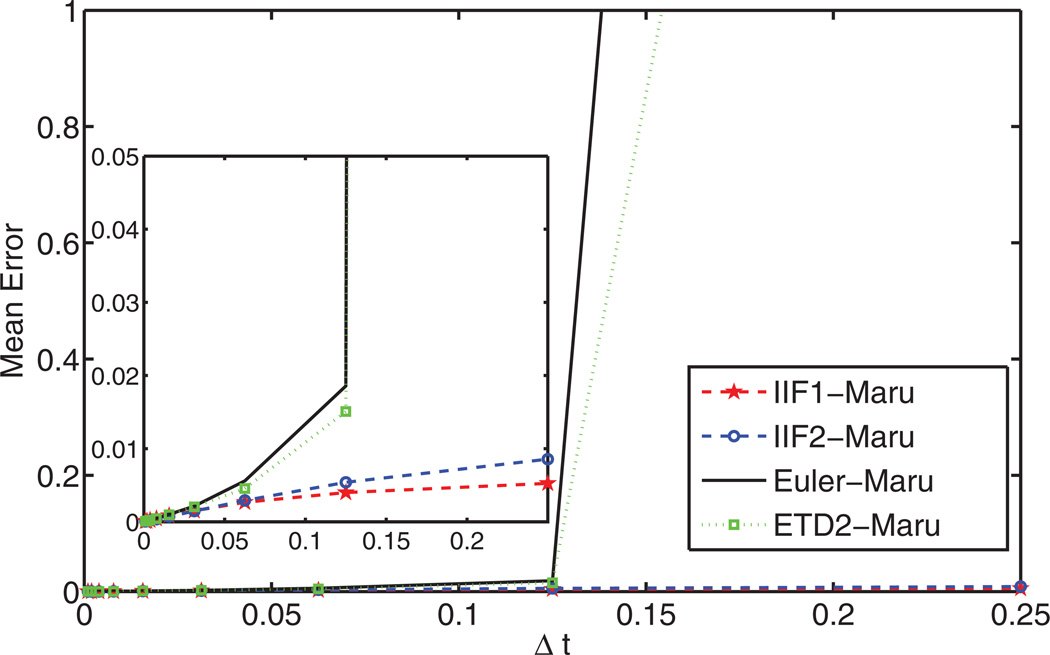
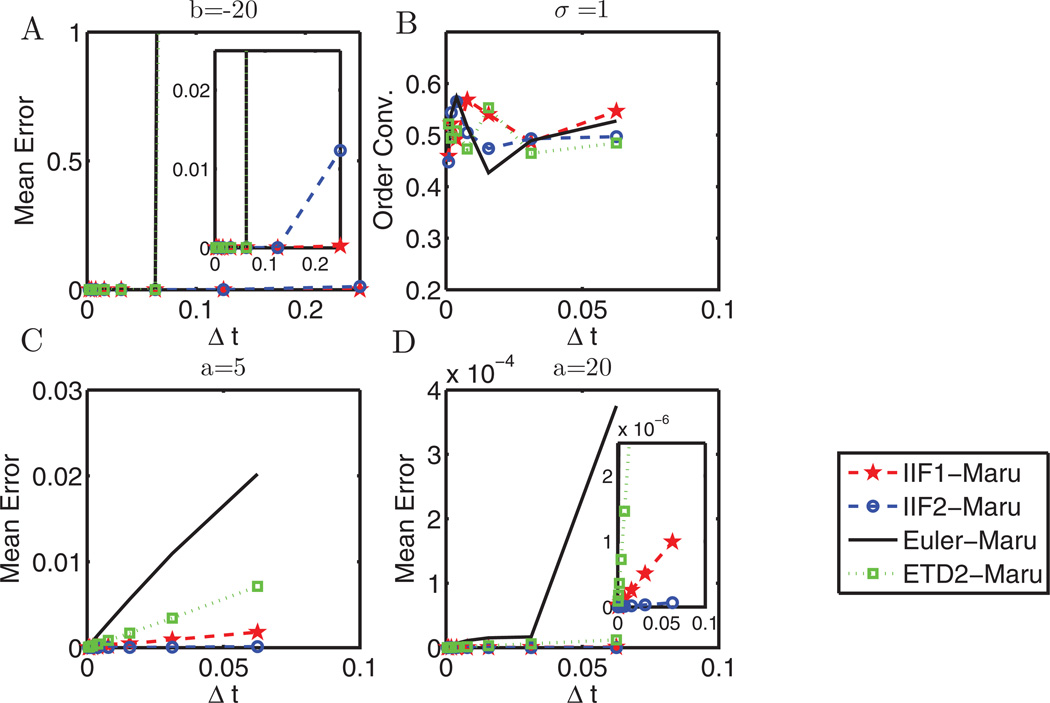
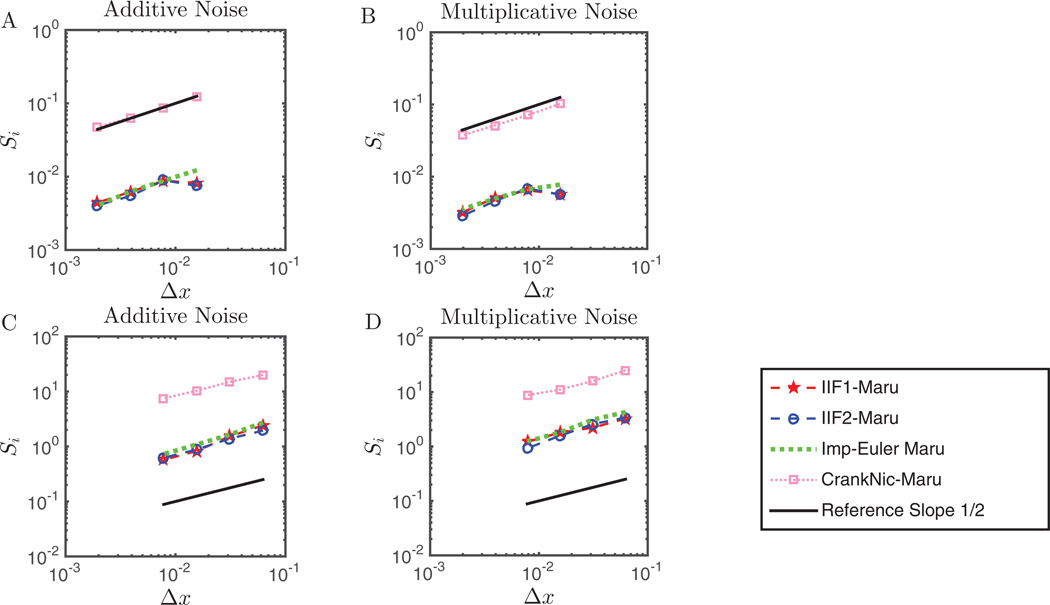
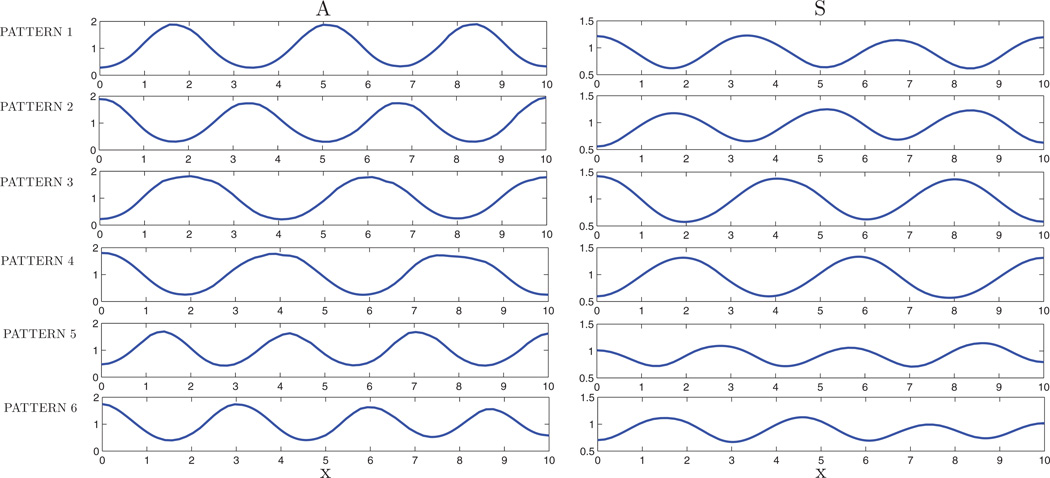
Stochastic effects are often present in the biochemical systems involving reactions and diffusions. When the reactions are stiff, existing numerical methods for stochastic reaction diffusion equations require either very small time steps for any explicit schemes or solving large nonlinear systems at each time step for the implicit schemes. Here we present a class of semi-implicit integration factor methods that treat the diffusion term exactly and reaction implicitly for a system of stochastic reaction-diffusion equations. Our linear stability analysis shows the advantage of such methods for both small and large amplitudes of noise. Direct use of the method to solving several linear and nonlinear stochastic reaction-diffusion equations demonstrates good accuracy, efficiency, and stability properties. This new class of methods, which are easy to implement, will have broader applications in solving stochastic reaction-diffusion equations arising from models in biology and physical sciences.
Keywords: IIF-Maruyama; Integration Factor method; Stochastic reaction-diffusion systems; activator-susbtrate system; patterns.
Figures






References
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources