

Selectively manipulable acoustic-powered microswimmers
- PMID: 25993314
- PMCID: PMC4438614
- DOI: 10.1038/srep09744
Selectively manipulable acoustic-powered microswimmers
Abstract
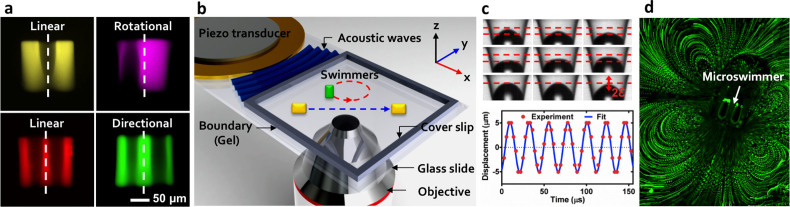
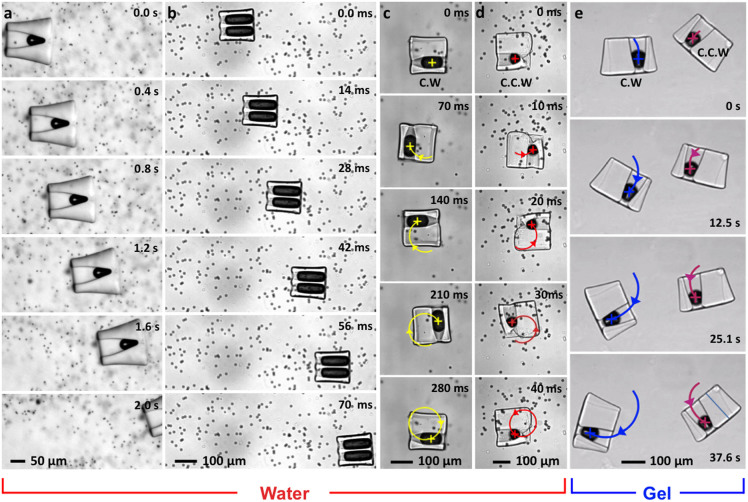
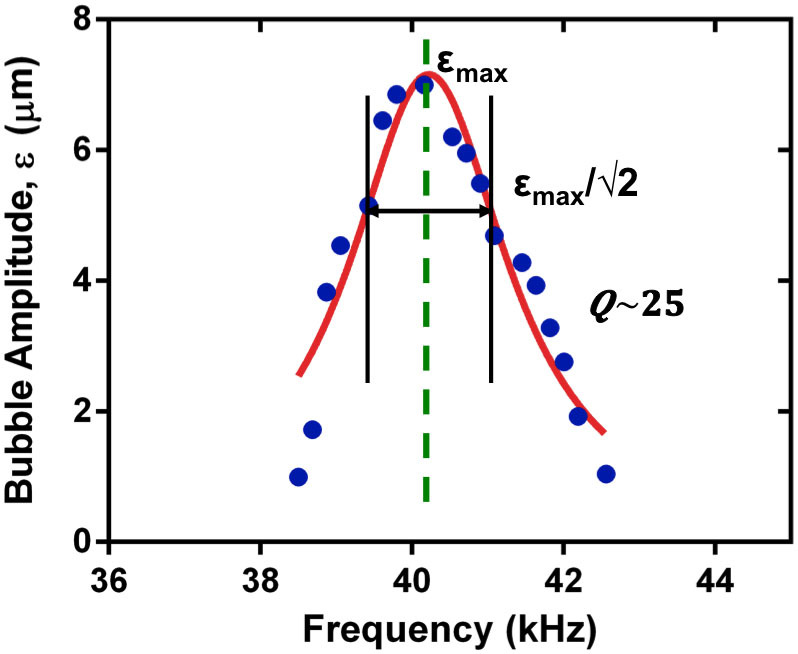
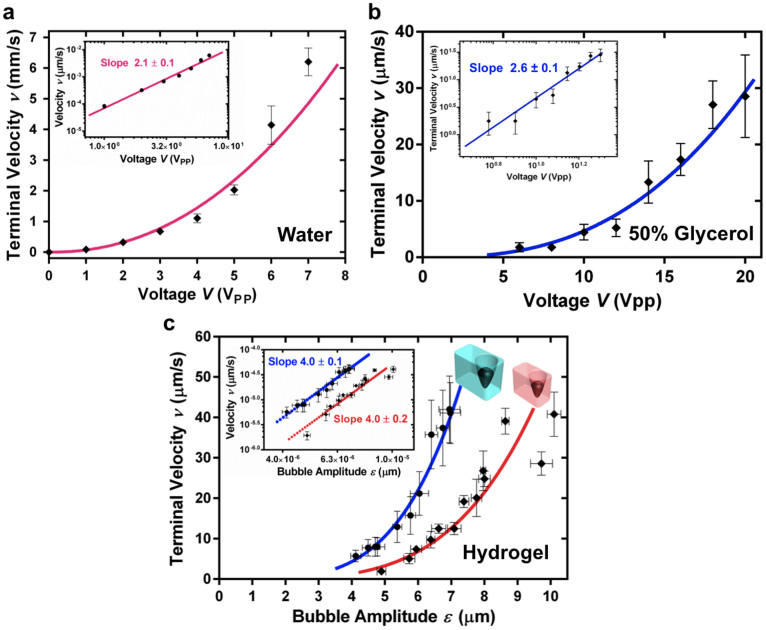
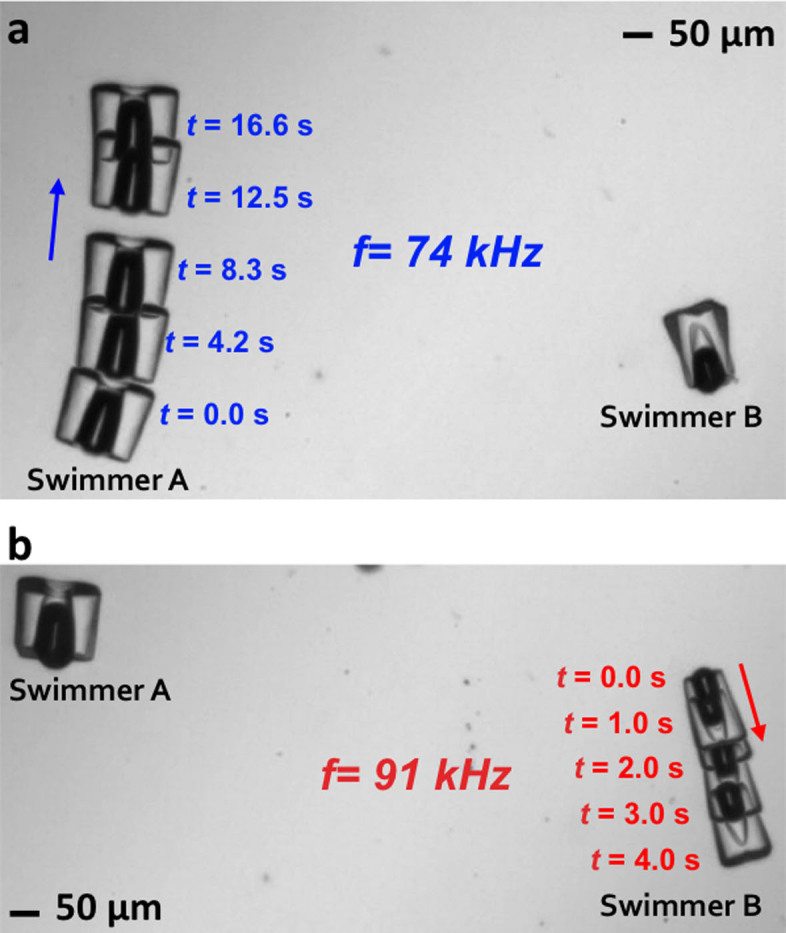
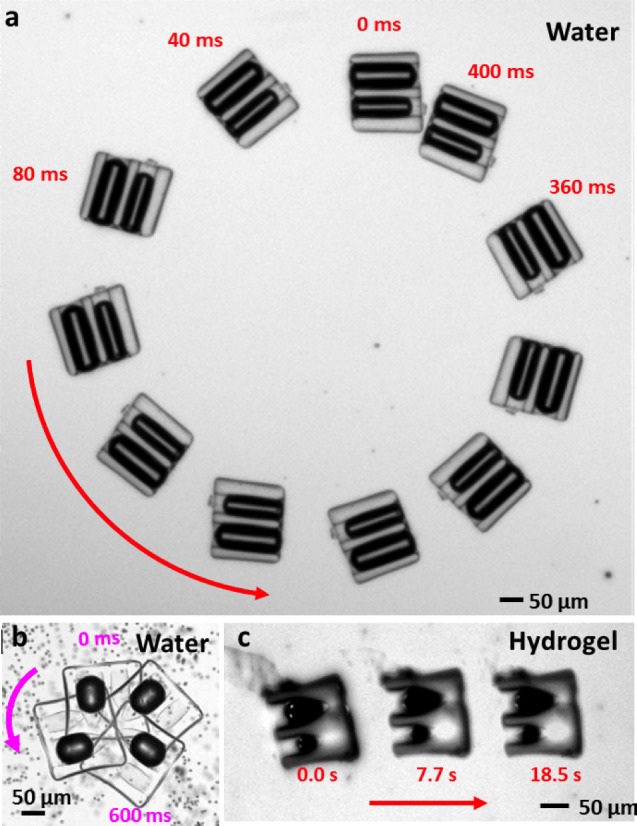
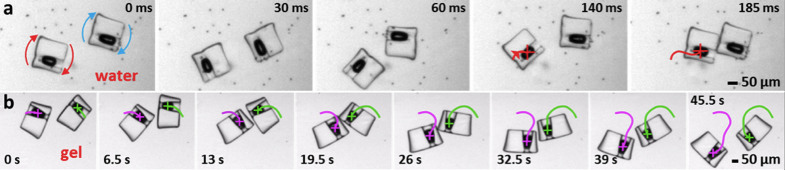
Selective actuation of a single microswimmer from within a diverse group would be a first step toward collaborative guided action by a group of swimmers. Here we describe a new class of microswimmer that accomplishes this goal. Our swimmer design overcomes the commonly-held design paradigm that microswimmers must use non-reciprocal motion to achieve propulsion; instead, the swimmer is propelled by oscillatory motion of an air bubble trapped within the swimmer's polymer body. This oscillatory motion is driven by the application of a low-power acoustic field, which is biocompatible with biological samples and with the ambient liquid. This acoustically-powered microswimmer accomplishes controllable and rapid translational and rotational motion, even in highly viscous liquids (with viscosity 6,000 times higher than that of water). And by using a group of swimmers each with a unique bubble size (and resulting unique resonance frequencies), selective actuation of a single swimmer from among the group can be readily achieved.
Figures
References
-
- Purcell E. M. Life at low Reynolds number. Am. J. Phys. 45, 3 (1977).
-
- Won J. M., Lee J. H., Lee K. H., Rhee K. & Chung S. K. Propulsion of water-floating objects by acoustically oscillating microbubbles. Int. J. Precis. Eng. Manuf. 12, 577–580 (2011).
-
- Patra D. et al. Intelligent, self-powered, drug delivery systems. Nanoscale 5, 1273–83 (2013). - PubMed
-
- Gourevich D. et al. Ultrasound-mediated targeted drug delivery with a novel cyclodextrin-based drug carrier by mechanical and thermal mechanisms. J. Control. release 170, 316–24 (2013). - PubMed
Publication types
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
