

Information processing via physical soft body
- PMID: 26014748
- PMCID: PMC4444959
- DOI: 10.1038/srep10487
Information processing via physical soft body
Abstract
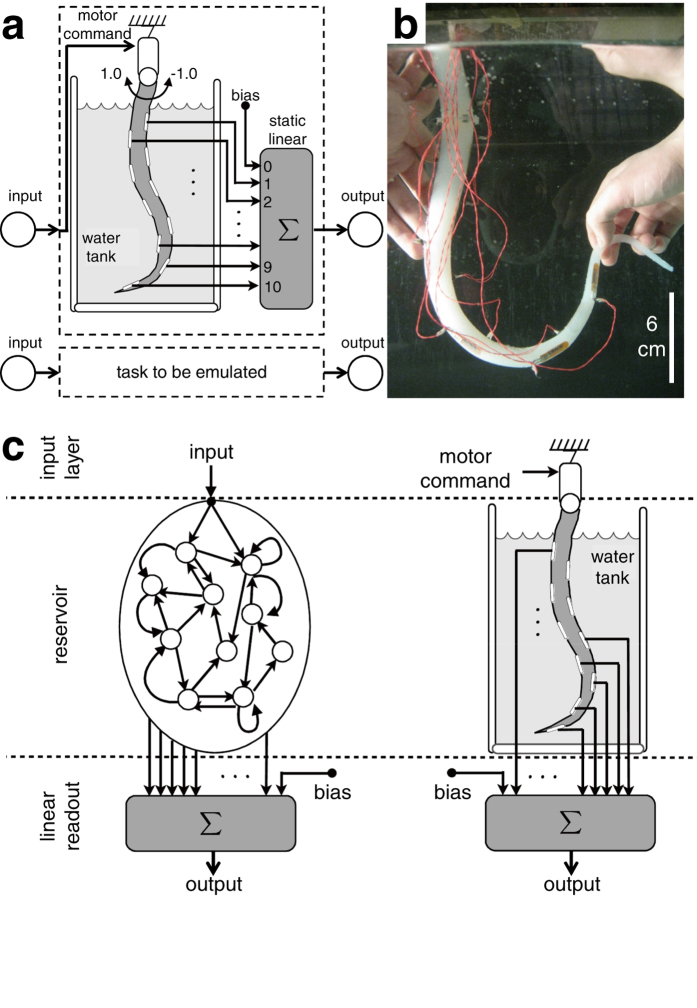
Soft machines have recently gained prominence due to their inherent softness and the resulting safety and resilience in applications. However, these machines also have disadvantages, as they respond with complex body dynamics when stimulated. These dynamics exhibit a variety of properties, including nonlinearity, memory, and potentially infinitely many degrees of freedom, which are often difficult to control. Here, we demonstrate that these seemingly undesirable properties can in fact be assets that can be exploited for real-time computation. Using body dynamics generated from a soft silicone arm, we show that they can be employed to emulate desired nonlinear dynamical systems. First, by using benchmark tasks, we demonstrate that the nonlinearity and memory within the body dynamics can increase the computational performance. Second, we characterize our system's computational capability by comparing its task performance with a standard machine learning technique and identify its range of validity and limitation. Our results suggest that soft bodies are not only impressive in their deformability and flexibility but can also be potentially used as computational resources on top and for free.
Figures
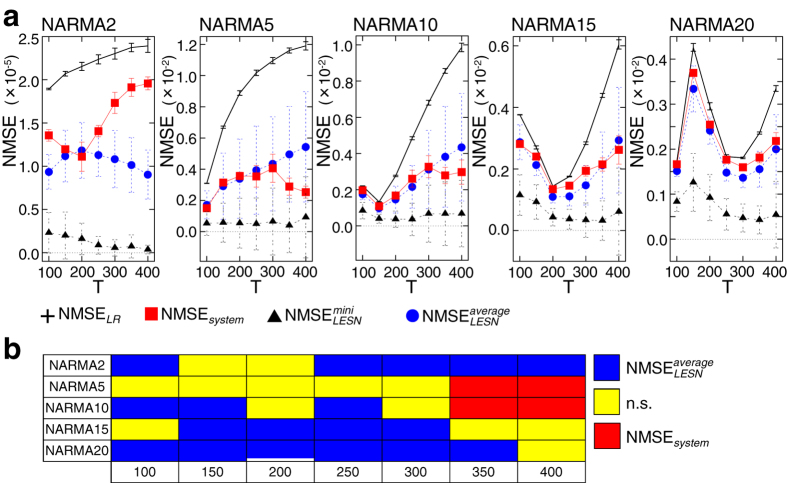
 is significantly lower than the average NMSEsystem for each setting of T (Supplementary Table S1). In (b), among NMSEsystem and
is significantly lower than the average NMSEsystem for each setting of T (Supplementary Table S1). In (b), among NMSEsystem and  , the significantly lower one with p < 0.05 is depicted for each experimental condition. Note that “n.s.” represents “not significant.” All the information, including the average NMSEs as well as the results for significant tests in each experimental condition, is given in Supplementary Table S1.
, the significantly lower one with p < 0.05 is depicted for each experimental condition. Note that “n.s.” represents “not significant.” All the information, including the average NMSEs as well as the results for significant tests in each experimental condition, is given in Supplementary Table S1.References
-
- Trivedi D., Rahn C. D., Kier W. M., Walker I. D. Soft robotics: biological inspiration, state of the art, and future research. Appl. Bionics. Biomech. 5, 99–117 (2008).
-
- Pfeifer R., Lungarella M., Iida F. The challenges ahead for bio-inspired ‘soft’ robotics. Commun. ACM. 55, 76–87 (2012).
-
- Kim S., Laschi C., Trimmer B. Soft robotics: a new perspective in robot evolution. Trends Biotechnol. 31, 287–294 (2013). - PubMed
-
- Morin S. A. et al. Camouflage and display for soft machines. Science 337, 828–832 (2012). - PubMed
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
