

A Unifying Model for Capture-Recapture and Distance Sampling Surveys of Wildlife Populations
- PMID: 26063947
- PMCID: PMC4440664
- DOI: 10.1080/01621459.2014.893884
A Unifying Model for Capture-Recapture and Distance Sampling Surveys of Wildlife Populations
Abstract
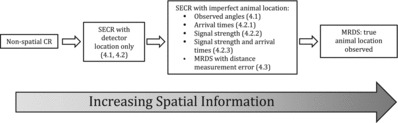
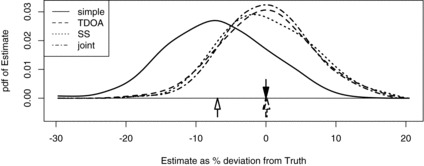
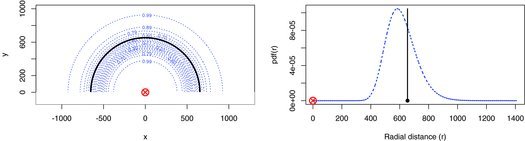
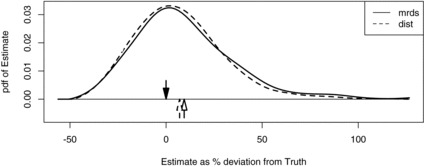
A fundamental problem in wildlife ecology and management is estimation of population size or density. The two dominant methods in this area are capture-recapture (CR) and distance sampling (DS), each with its own largely separate literature. We develop a class of models that synthesizes them. It accommodates a spectrum of models ranging from nonspatial CR models (with no information on animal locations) through to DS and mark-recapture distance sampling (MRDS) models, in which animal locations are observed without error. Between these lie spatially explicit capture-recapture (SECR) models that include only capture locations, and a variety of models with less location data than are typical of DS surveys but more than are normally used on SECR surveys. In addition to unifying CR and DS models, the class provides a means of improving inference from SECR models by adding supplementary location data, and a means of incorporating measurement error into DS and MRDS models. We illustrate their utility by comparing inference on acoustic surveys of gibbons and frogs using only capture locations, using estimated angles (gibbons) and combinations of received signal strength and time-of-arrival data (frogs), and on a visual MRDS survey of whales, comparing estimates with exact and estimated distances. Supplementary materials for this article are available online.
Keywords: Abundance estimation; Acoustic survey; Closed population; Measurement error; Visual survey.
Figures
References
-
- Bonner S. Response to: A New Method for Estimating Animal Abundance With Two Sources of Data in Capture-Recapture Studies. Methods in Ecology and Evolution. 2013;4:585–588.
-
- Borchers D.L. Line Transect Abundance Estimation With Uncertain Detection on the Trackline. 1996 PhD Thesis, University of Cape Town, Cape Town.
-
- Borchers D.L. Buckland S.T. Zucchini W. Estimating Animal Abundance: Closed Populations. London: Springer; 2002.
-
- Borchers D.L. Efford M.G. Spatially Explicit Maximum Likelihood Methods for Capture-Recapture Studies. Biometrics. 2008;64:377–385. - PubMed
-
- Borchers D.L. Laake J.L. Southwell C. Paxton C. G.M. Accommodating Unmodelled Heterogeneity in Double-Observer Distance Sampling Surveys. Biometrics. 2006;62:372–378. - PubMed
LinkOut - more resources
Full Text Sources
Other Literature Sources