

Can a Humanoid Face be Expressive? A Psychophysiological Investigation
- PMID: 26075199
- PMCID: PMC4443734
- DOI: 10.3389/fbioe.2015.00064
Can a Humanoid Face be Expressive? A Psychophysiological Investigation
Abstract
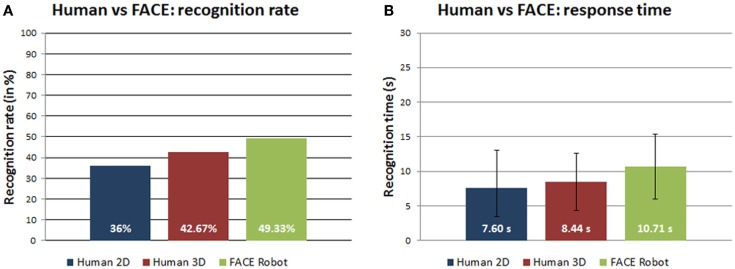
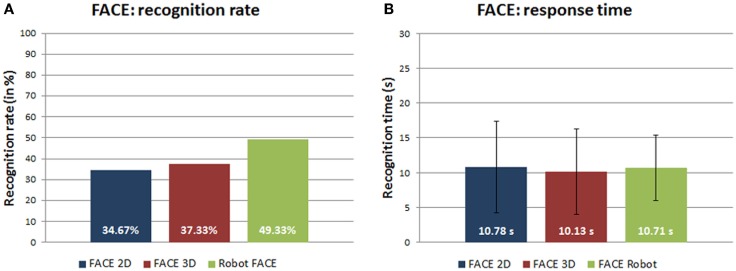
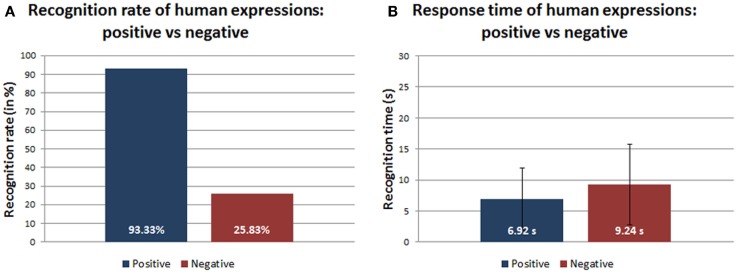
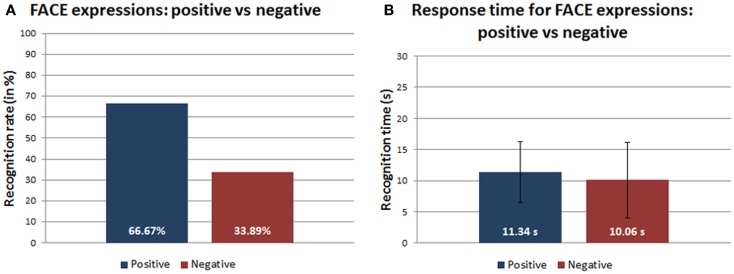
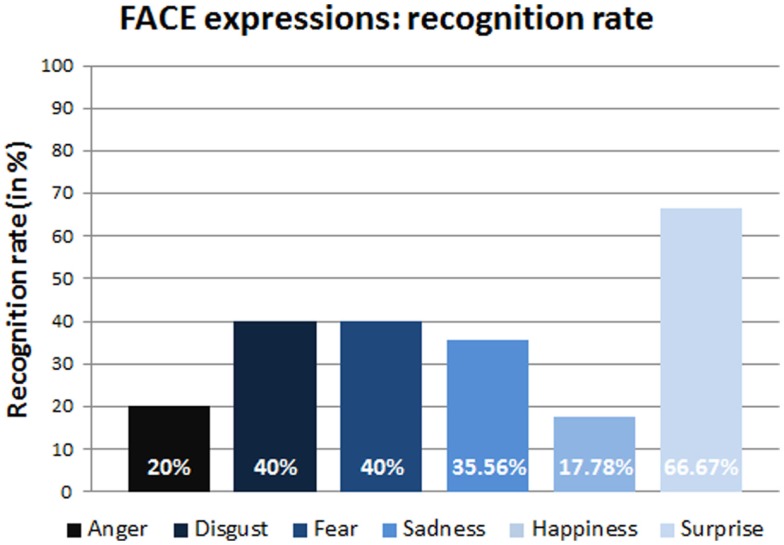
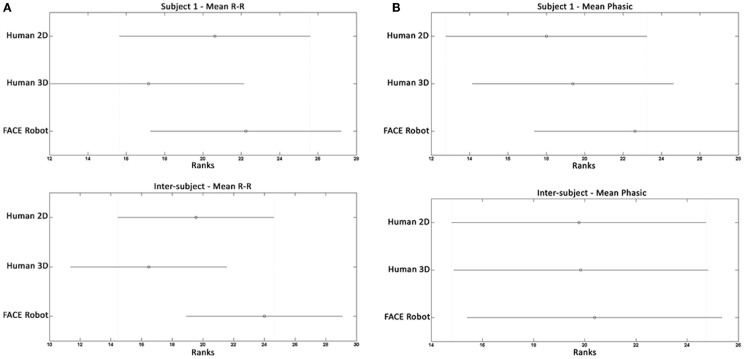
Non-verbal signals expressed through body language play a crucial role in multi-modal human communication during social relations. Indeed, in all cultures, facial expressions are the most universal and direct signs to express innate emotional cues. A human face conveys important information in social interactions and helps us to better understand our social partners and establish empathic links. Latest researches show that humanoid and social robots are becoming increasingly similar to humans, both esthetically and expressively. However, their visual expressiveness is a crucial issue that must be improved to make these robots more realistic and intuitively perceivable by humans as not different from them. This study concerns the capability of a humanoid robot to exhibit emotions through facial expressions. More specifically, emotional signs performed by a humanoid robot have been compared with corresponding human facial expressions in terms of recognition rate and response time. The set of stimuli included standardized human expressions taken from an Ekman-based database and the same facial expressions performed by the robot. Furthermore, participants' psychophysiological responses have been explored to investigate whether there could be differences induced by interpreting robot or human emotional stimuli. Preliminary results show a trend to better recognize expressions performed by the robot than 2D photos or 3D models. Moreover, no significant differences in the subjects' psychophysiological state have been found during the discrimination of facial expressions performed by the robot in comparison with the same task performed with 2D photos and 3D models.
Keywords: affective computing; emotion perception; expression recognition; facial expressions; humanoid robot; psychophysiological signals; social robots.
Figures
References
-
- Andreassi J. L. (2000). Psychophysiology: Human Behavior and Physiological Response, 4th Edn Mahwah, NJ: Lawrence Erlbaum Associates, Inc.
-
- Bartneck C., Kanda T., Ishiguro H., Hagita N. (2007). “Is the uncanny valley an uncanny cliff?,” in The 16th IEEE International Symposium on Robot and Human interactive Communication (RO-MAN 2007) (Jeju Island: IEEE), 368–373.
-
- Bartneck C., Reichenbach J., Van Breemen A. (2004). “In your face, robot! The influence of a character’s embodiment on how users perceive its emotional expressions,” in Design and Emotion Conference (Ankara: IEEE), 2004.
LinkOut - more resources
Full Text Sources
Other Literature Sources