

Reaching for the Unreachable: Reorganization of Reaching with Walking
- PMID: 26110046
- PMCID: PMC4476390
- DOI: 10.1109/TAMD.2013.2255872
Reaching for the Unreachable: Reorganization of Reaching with Walking
Abstract
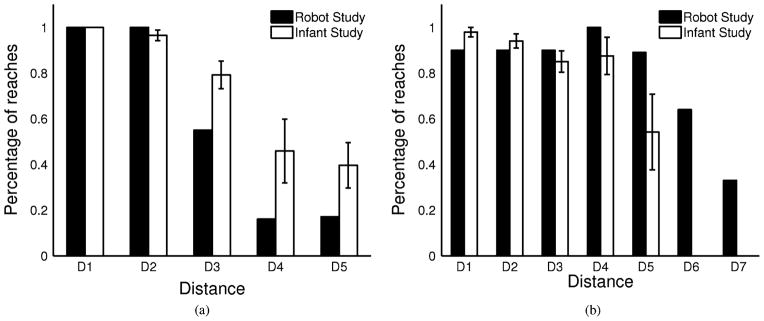
Previous research suggests that reaching and walking behaviors may be linked developmentally as reaching changes at the onset of walking. Here we report new evidence on an apparent loss of the distinction between the reachable and nonreachable distances as children start walking. The experiment compared nonwalkers, walkers with help, and independent walkers in a reaching task to targets at varying distances. Reaching attempts, contact, leaning, and communication behaviors were recorded. Most of the children reached for the unreachable objects the first time it was presented. Nonwalkers, however, reached less on the subsequent trials showing clear adjustment of their reaching decisions with the failures. On the contrary, walkers consistently attempted reaches to targets at unreachable distances. We suggest that these reaching errors may result from inappropriate integration of reaching and locomotor actions, attention control and near/far visual space. We propose a reward-mediated model implemented on a NAO humanoid robot that replicates the main results from our study showing an increase in reaching attempts to nonreachable distances after the onset of walking.
Keywords: Infant reaching; near and far space integration; perceived reachability; reaching and walking.
Figures





References
-
- Berti A, Frassinetti F. When far becomes near: remapping of space by tool use. J Cogn Neurosci. 2000;12(3):415–420. - PubMed
-
- Berti A, Smania N, Allport A. Coding of far and near space in neglect patients. Neuroimage 2001 Jul;14 (1 Pt 2):S98–102. 2001;14:98–102. - PubMed
-
- Higuchi T, Imanaka K, Patla AE. Action-oriented representation of peripersonal and extrapersonal space: Insights from manual and locomotor actions. Japan Psychol Res. 2006;48(3):126–140.
-
- Lamb E, Sherrod L, Sherrod L, Lamb M. Infant Social Cognition: Theoretical and Empirical Considerations. New York, NY, USA: Taylor & Francis; 1980. [Online]. Available: http://books.google.es/books?id=vtjJx\_UBJlMC, [Online]. Available.
-
- Piaget J. The Construction of Reality in the Child. NewYork, NY, USA: Basic Books; 1954.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources