

In-bore prostate transperineal interventions with an MRI-guided parallel manipulator: system development and preliminary evaluation
- PMID: 26111458
- PMCID: PMC4691445
- DOI: 10.1002/rcs.1671
In-bore prostate transperineal interventions with an MRI-guided parallel manipulator: system development and preliminary evaluation
Abstract
Background: Robot-assisted minimally-invasive surgery is well recognized as a feasible solution for diagnosis and treatment of prostate cancer in humans.
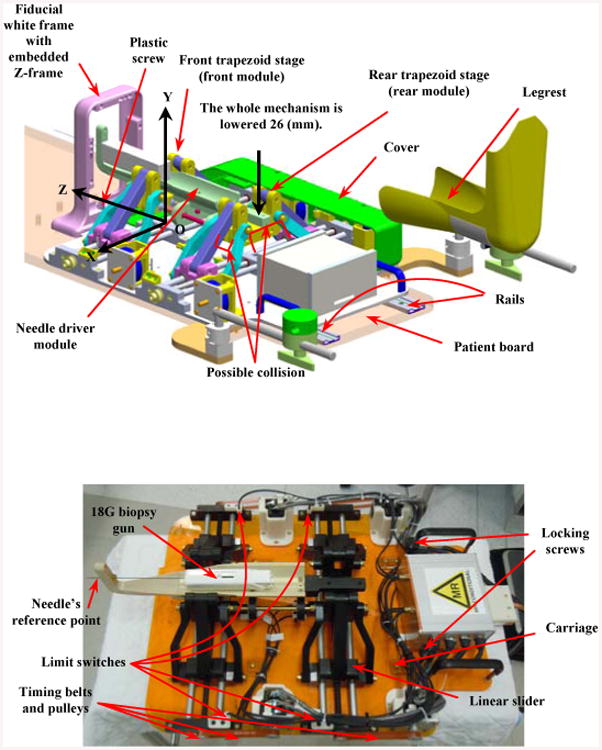
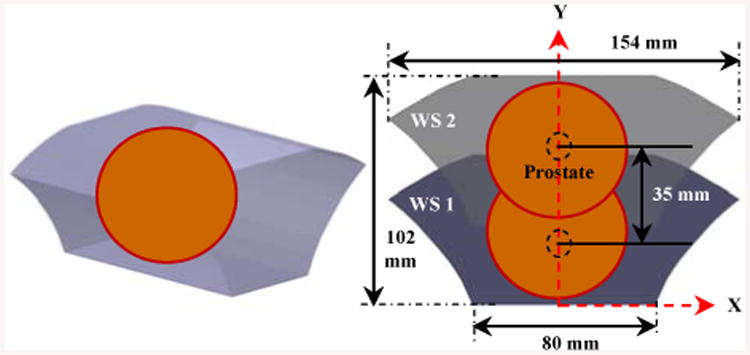
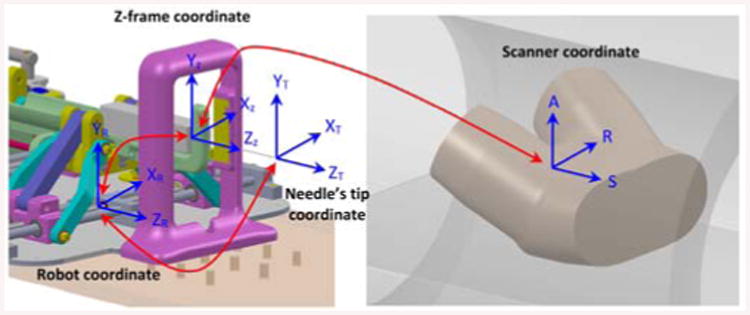
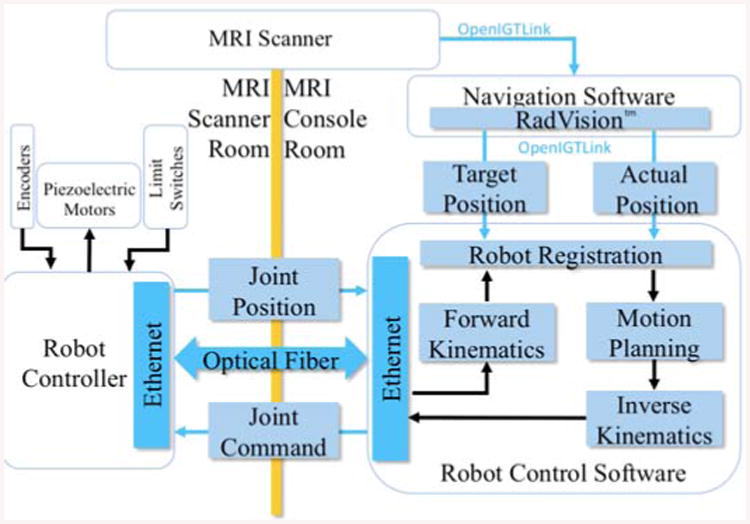
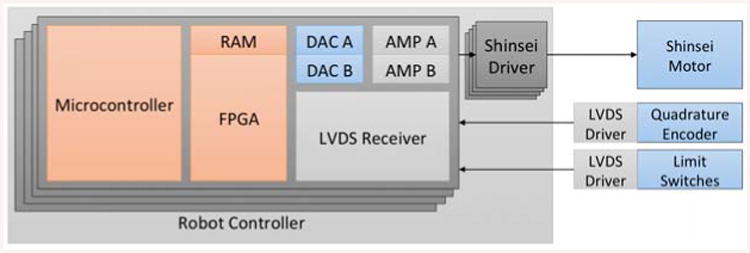
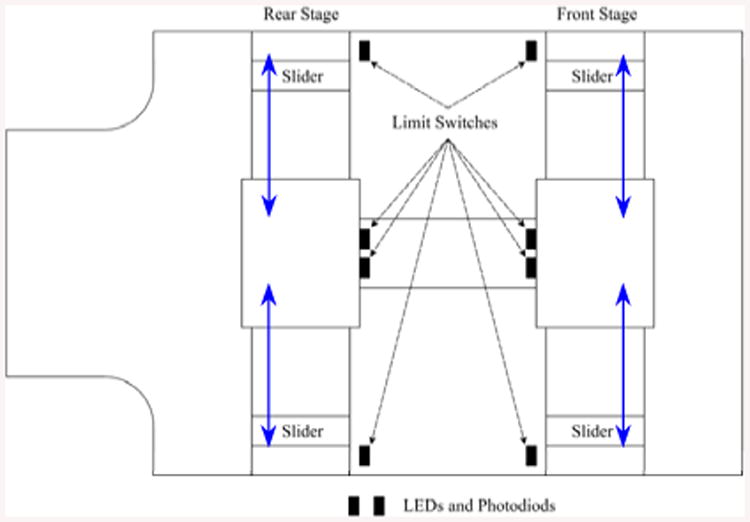
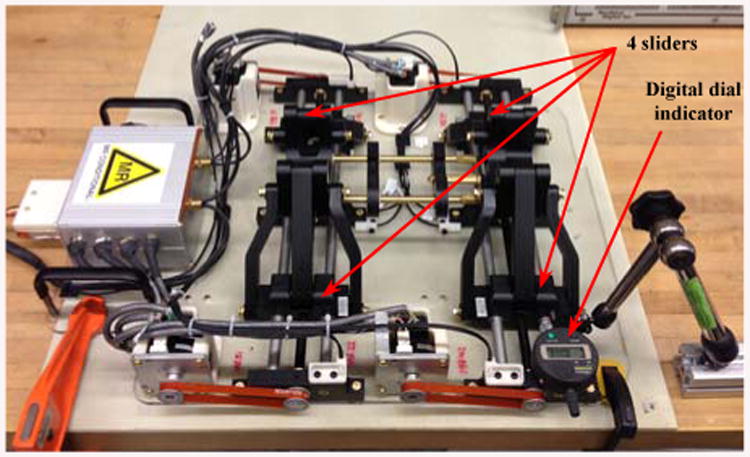
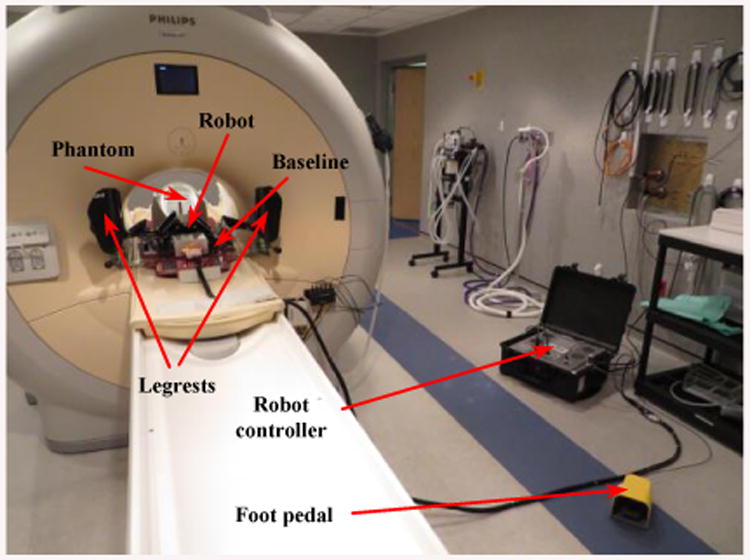
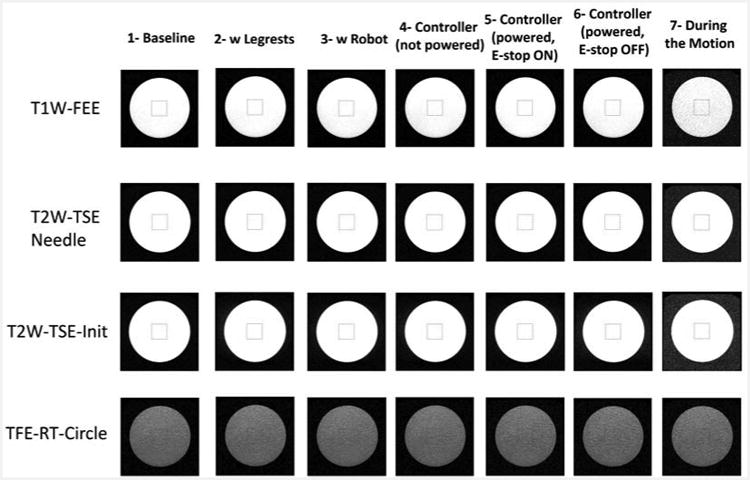
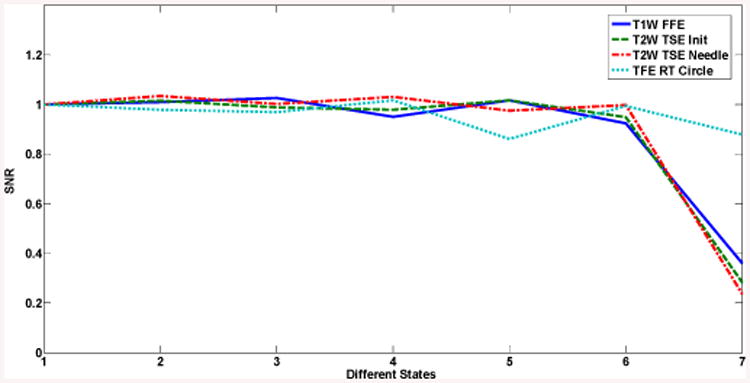
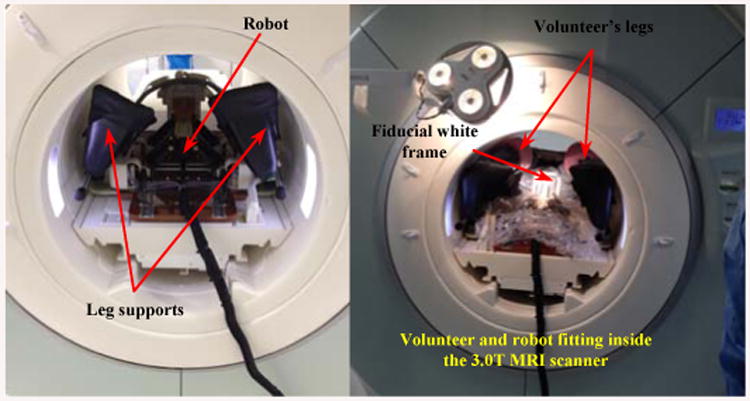
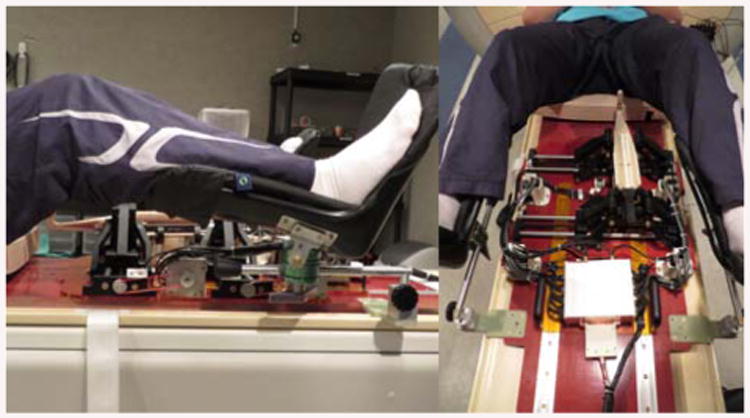
Methods: This paper discusses the kinematics of a parallel 4 Degrees-of-Freedom (DOF) surgical manipulator designed for minimally invasive in-bore prostate percutaneous interventions through the patient's perineum. The proposed manipulator takes advantage of four sliders actuated by MRI-compatible piezoelectric motors and incremental rotary encoders. Errors, mostly originating from the design and manufacturing process, need to be identified and reduced before the robot is deployed in clinical trials.
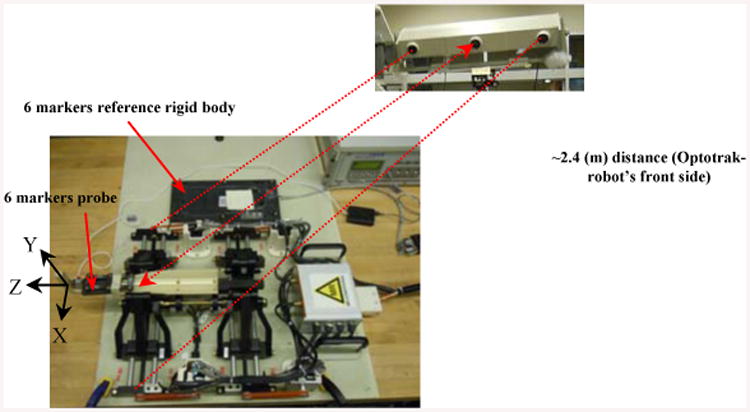
Results: The manipulator has undergone several experiments to evaluate the repeatability and accuracy (about 1 mm in air (in x or y direction) at the needle's reference point) of needle placement, which is an essential concern in percutaneous prostate interventions.
Conclusion: The acquired results endorse the sustainability, precision and reliability of the manipulator. Copyright © 2015 John Wiley & Sons, Ltd.
Keywords: MRI compatible; biopsy; calibration assessment; parallel manipulator; prostate transperineal intervention.
Copyright © 2015 John Wiley & Sons, Ltd.
Conflict of interest statement
Hata's interests were reviewed and are managed by the Brigham and Women's Hospital and Partners HealthCare in accordance with their conflict of interest policies.
Figures
References
-
- Schneider CM, Okamura AM, Fichtinger G. IEEE International Conference on Robotics and Automation (ICRA) New Orleans, LA: Apr, 2004. A robotic system for transrectal needle insertion into the prostate with integrated ultrasound; pp. 365–370.
-
- Fichtinger G, Burdette EC, Tanacs A, Patriciu A, Mazilu D, Whitcomb LL, Stoianovici D. Robotically assisted prostate brachytherapy with transrectal ultrasound guidance – phantom experiments. Brachytherapy. 2006;5:14–26. - PubMed
-
- van den Bosch MR, Moman MR, van Vulpen M, Battermann JJ, Duiveman E, van Schelven LJ, de Leeuw H, Lagendijk JJW, Moerland MA. MRI-guided robotic system for transperineal prostate interventions: proof of principle. Phys Med Biol. 2010 Feb;55:N133–N140. - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
