

Explicit and Implicit Processes Constitute the Fast and Slow Processes of Sensorimotor Learning
- PMID: 26134640
- PMCID: PMC4571499
- DOI: 10.1523/JNEUROSCI.5061-14.2015
Explicit and Implicit Processes Constitute the Fast and Slow Processes of Sensorimotor Learning
Abstract
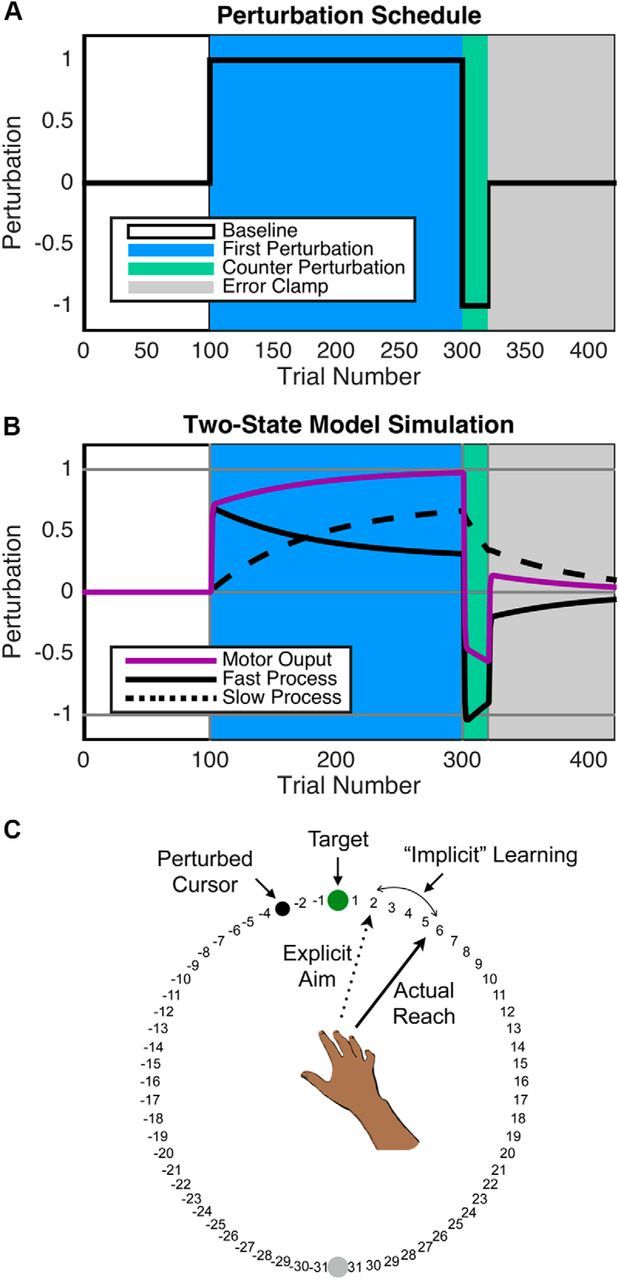
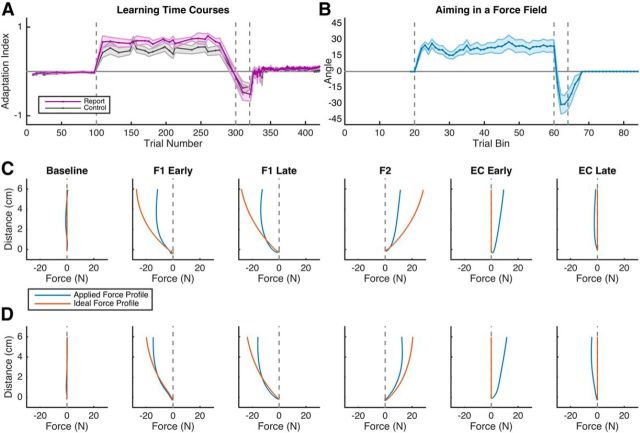
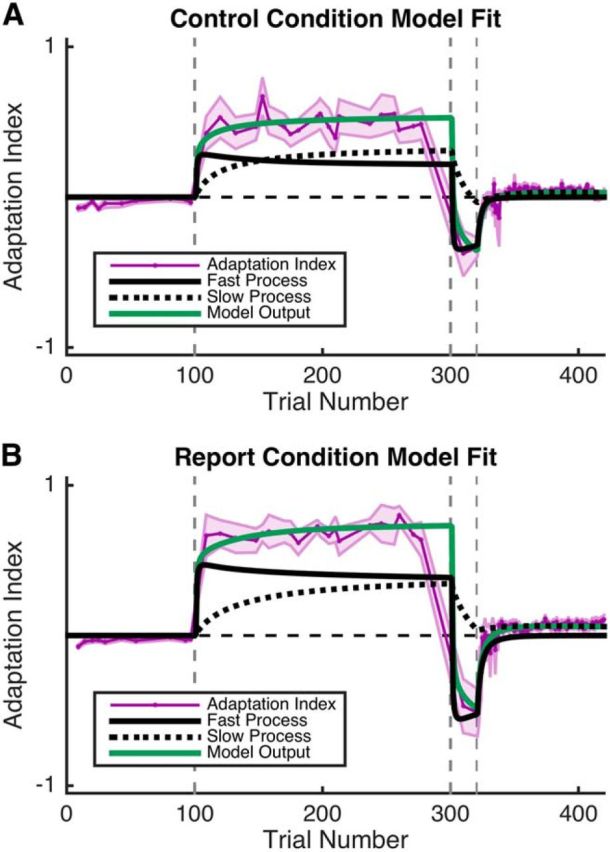
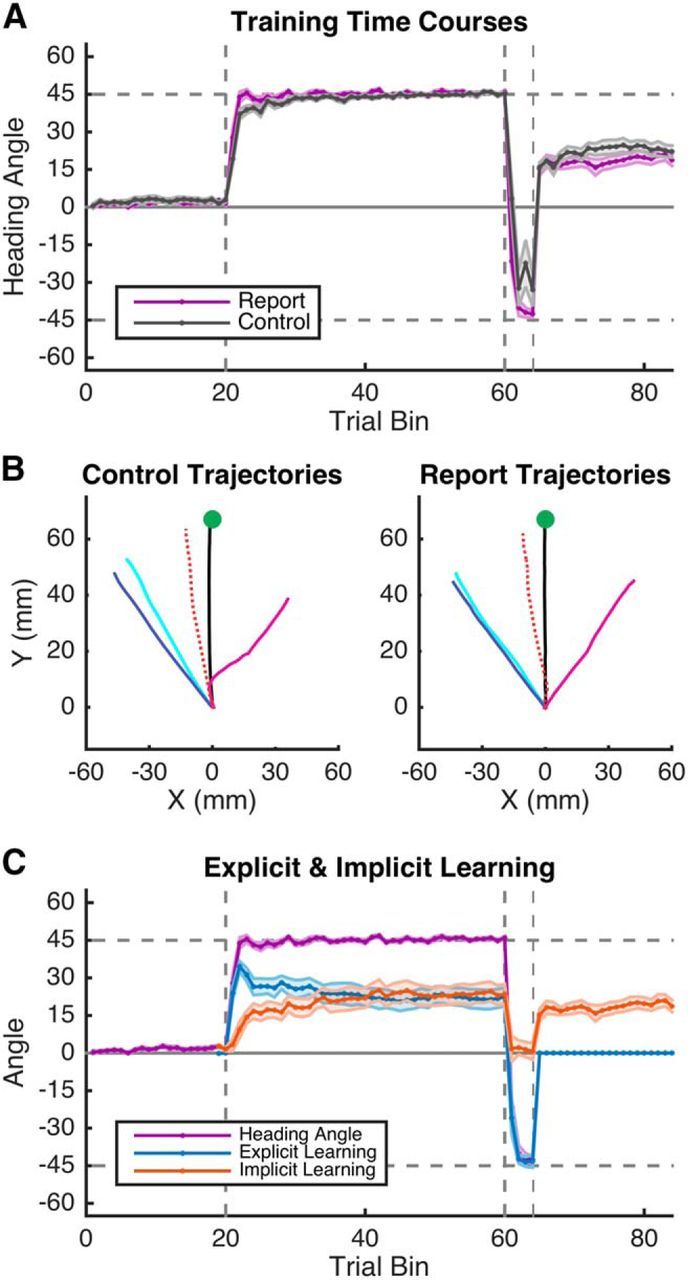
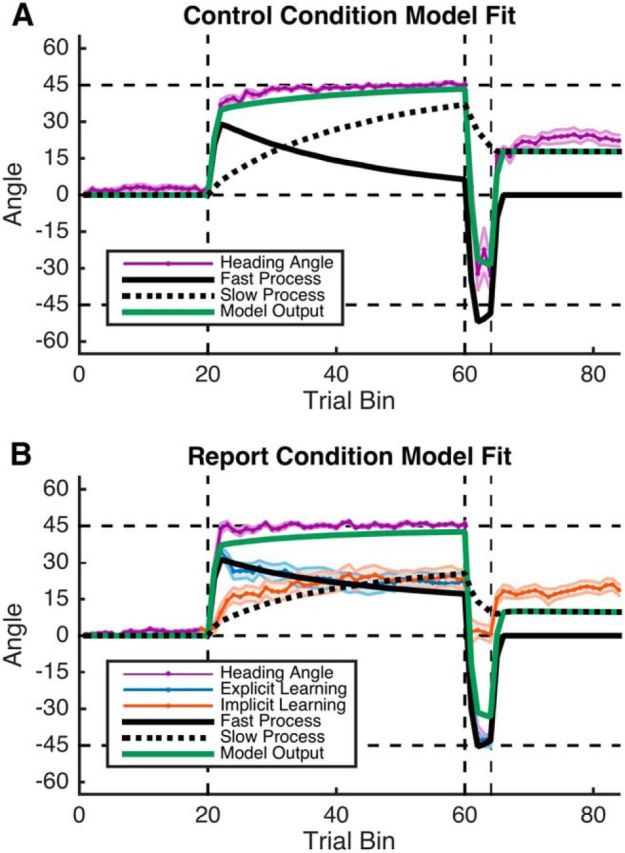
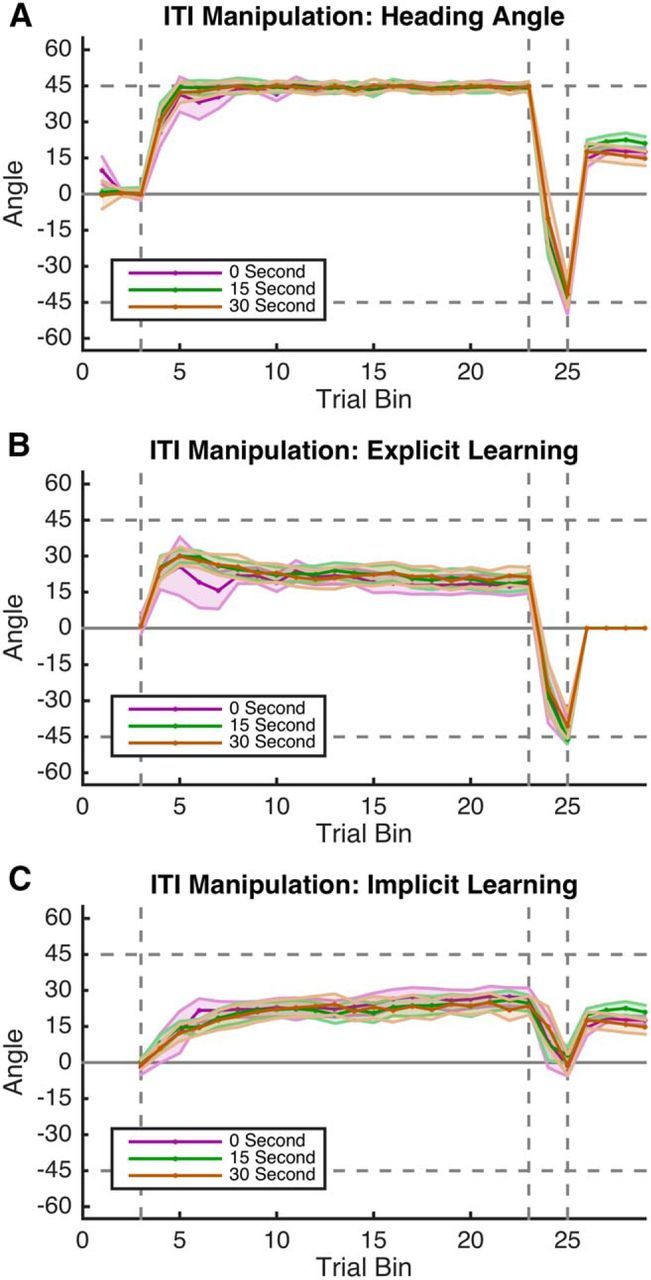
A popular model of human sensorimotor learning suggests that a fast process and a slow process work in parallel to produce the canonical learning curve (Smith et al., 2006). Recent evidence supports the subdivision of sensorimotor learning into explicit and implicit processes that simultaneously subserve task performance (Taylor et al., 2014). We set out to test whether these two accounts of learning processes are homologous. Using a recently developed method to assay explicit and implicit learning directly in a sensorimotor task, along with a computational modeling analysis, we show that the fast process closely resembles explicit learning and the slow process approximates implicit learning. In addition, we provide evidence for a subdivision of the slow/implicit process into distinct manifestations of motor memory. We conclude that the two-state model of motor learning is a close approximation of sensorimotor learning, but it is unable to describe adequately the various implicit learning operations that forge the learning curve. Our results suggest that a wider net be cast in the search for the putative psychological mechanisms and neural substrates underlying the multiplicity of processes involved in motor learning.
Keywords: adaptation; cerebellum; explicit learning; motor control; motor learning; reaching.
Copyright © 2015 the authors 0270-6474/15/359568-12$15.00/0.
Figures

References
-
- Brennan AE, Wu HG, Smith MA. Translational and Computational Motor Control, 2012. New Orleans: 2012. The identification of a rapidly-decaying, high-precision proprioceptive sensory memory and its effects on motor adaptation.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous