

Accurate real-time depth control for CP-SSOCT distal sensor based handheld microsurgery tools
- PMID: 26137393
- PMCID: PMC4467719
- DOI: 10.1364/BOE.6.001942
Accurate real-time depth control for CP-SSOCT distal sensor based handheld microsurgery tools
Abstract
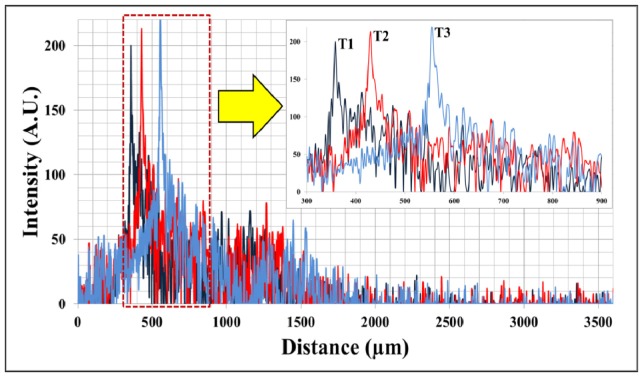
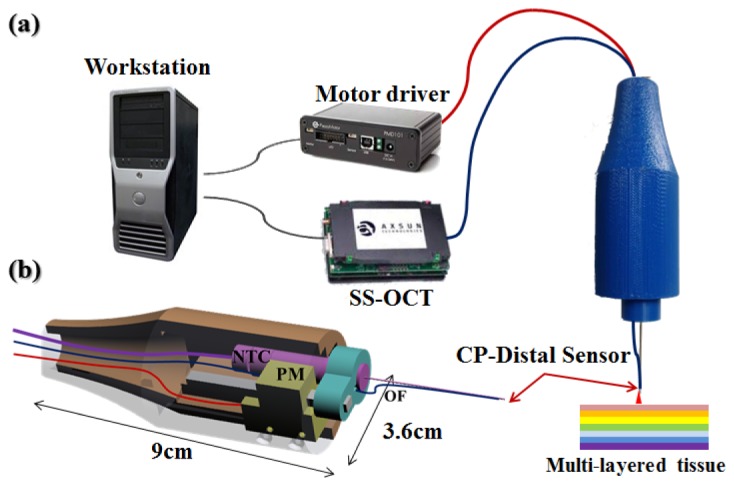
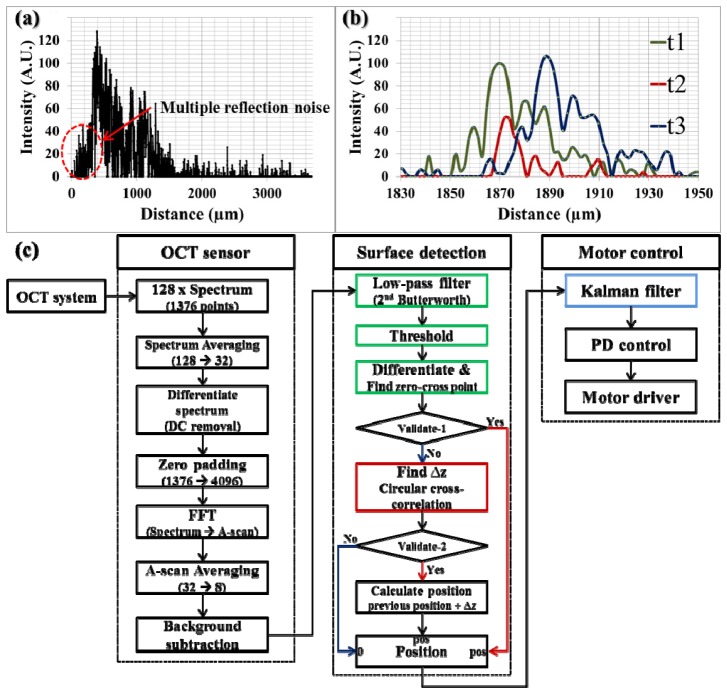
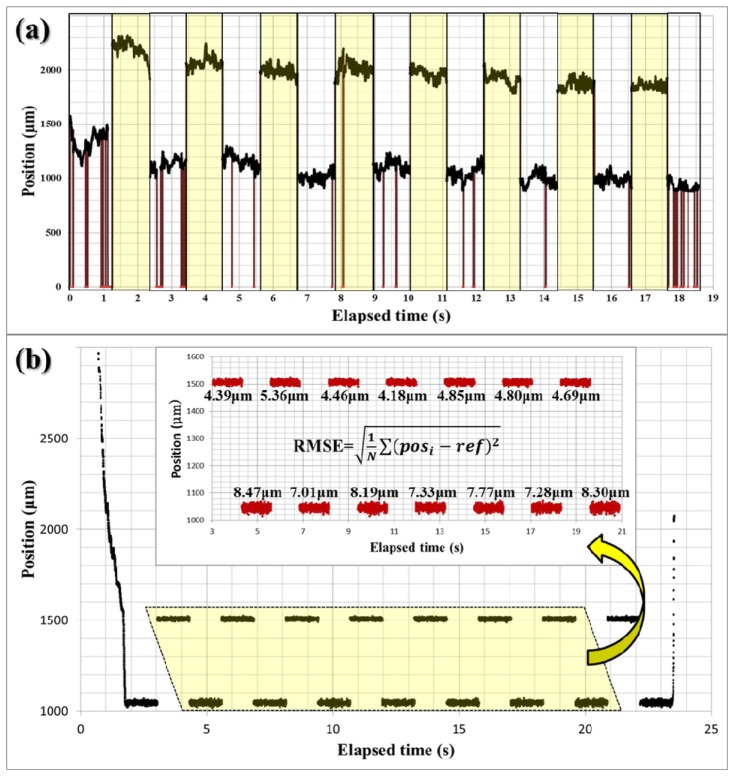
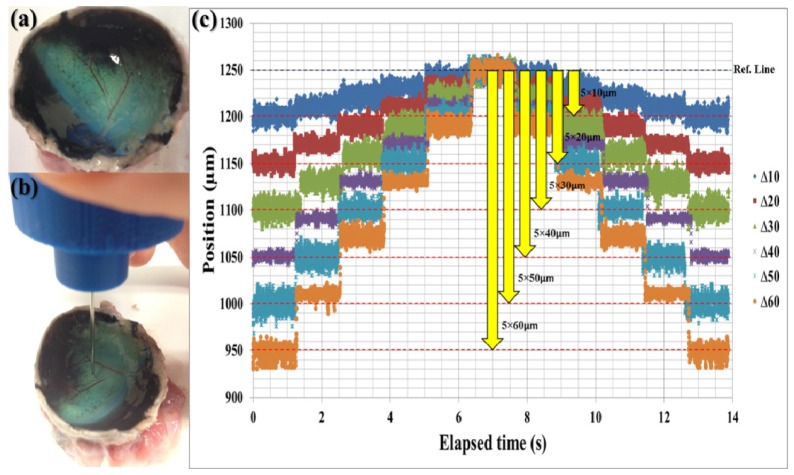
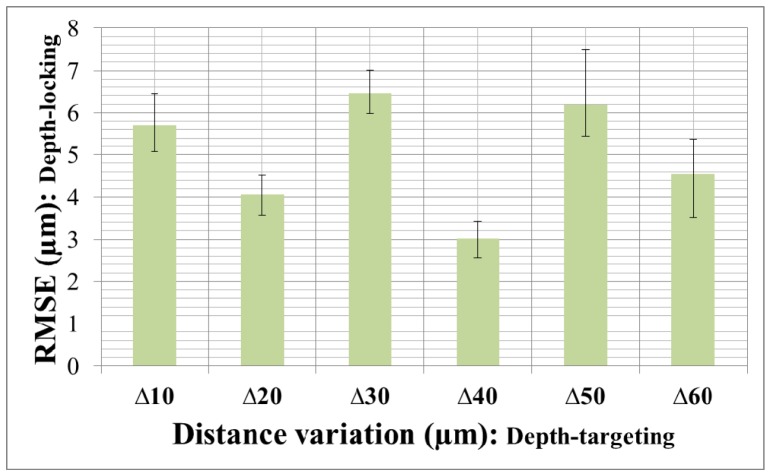
This paper presents a novel intuitive targeting and tracking scheme that utilizes a common-path swept source optical coherence tomography (CP-SSOCT) distal sensor integrated handheld microsurgical tool. To achieve micron-order precision control, a reliable and accurate OCT distal sensing method is required; simultaneously, a prediction algorithm is necessary to compensate for the system delay associated with the computational, mechanical and electronic latencies. Due to the multi-layered structure of retina, it is necessary to develop effective surface detection methods rather than simple peak detection. To achieve this, a shifted cross-correlation method is applied for surface detection in order to increase robustness and accuracy in distal sensing. A predictor based on Kalman filter was implemented for more precise motion compensation. The performance was first evaluated using an established dry phantom consisting of stacked cellophane tape. This was followed by evaluation in an ex-vivo bovine retina model to assess system accuracy and precision. The results demonstrate highly accurate depth targeting with less than 5 μm RMSE depth locking.
Keywords: (060.2370) Fiber optics sensors; (150.5758) Robotic and machine control; (170.4460) Ophthalmic optics and devices; (170.4500) Optical coherence tomography.
Figures
References
-
- Singh S. P. N., Riviere C. N., “Physiological tremor amplitude during retinal microsurgery,” in Proceedings of the IEEE 28th Annual Northeast Bioengineering Conference (2002), pp. 171–172.10.1109/NEBC.2002.999520 - DOI
-
- Taylor R. H., Jensen P., Whitcomb L., Barnes A., Kumar R., Stoianovici D., Gupta P., Wang Z., DeJuan E., Kavoussi L., “A Steady-Hand Robotic System for Microsurgical Augmentation,” Int. J. Robot. Res. 18(12), 1201–1210 (1999).10.1177/02783649922067807 - DOI
-
- Taylor R. H., Stoianovici D., “Medical Robotics in Computer-Integrated Surgery,” IEEE Trans. Robot. Autom. 19(5), 765–781 (2003).10.1109/TRA.2003.817058 - DOI
-
- Riviere C. N., Gangloff J., De Mathelin M., “Robotic compensation of biological motion to enhance surgical accuracy,” Proc. IEEE 94(9), 1705–1716 (2006).10.1109/JPROC.2006.880722 - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous