

Reinforcement learning of self-regulated β-oscillations for motor restoration in chronic stroke
- PMID: 26190995
- PMCID: PMC4490244
- DOI: 10.3389/fnhum.2015.00391
Reinforcement learning of self-regulated β-oscillations for motor restoration in chronic stroke
Abstract
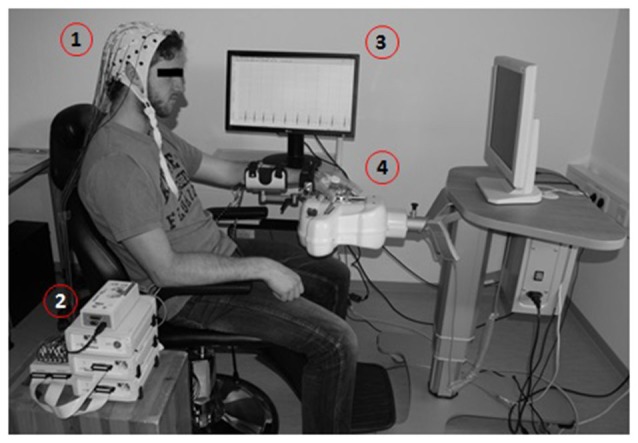
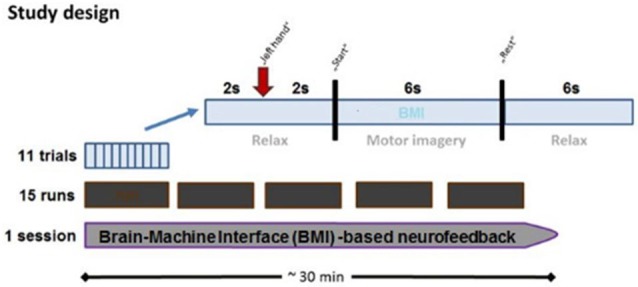
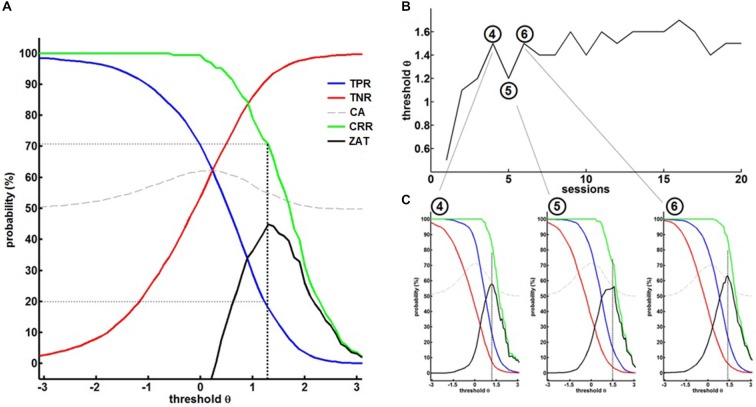
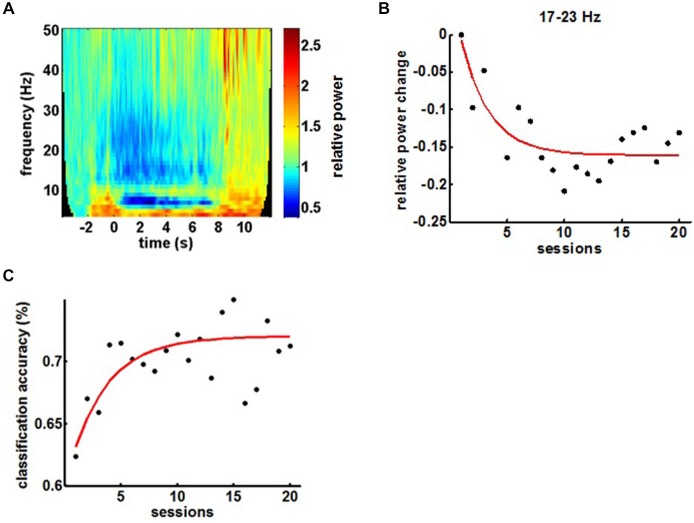
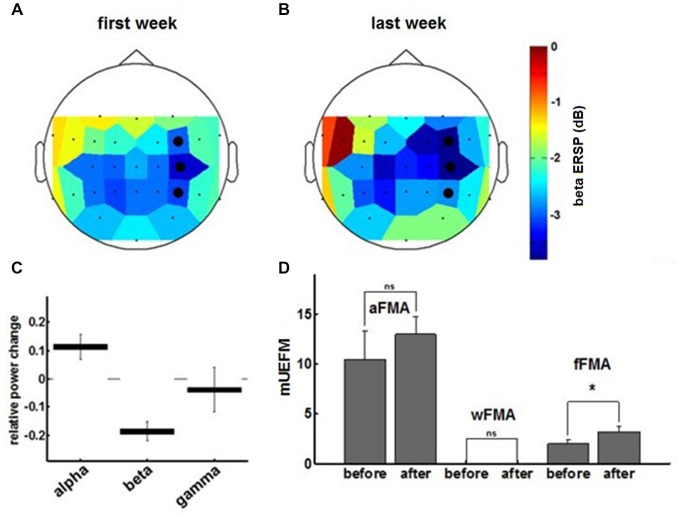
Neurofeedback training of Motor imagery (MI)-related brain-states with brain-computer/brain-machine interfaces (BCI/BMI) is currently being explored as an experimental intervention prior to standard physiotherapy to improve the motor outcome of stroke rehabilitation. The use of BCI/BMI technology increases the adherence to MI training more efficiently than interventions with sham or no feedback. Moreover, pilot studies suggest that such a priming intervention before physiotherapy might-like some brain stimulation techniques-increase the responsiveness of the brain to the subsequent physiotherapy, thereby improving the general clinical outcome. However, there is little evidence up to now that these BCI/BMI-based interventions have achieved operate conditioning of specific brain states that facilitate task-specific functional gains beyond the practice of primed physiotherapy. In this context, we argue that BCI/BMI technology provides a valuable neurofeedback tool for rehabilitation but needs to aim at physiological features relevant for the targeted behavioral gain. Moreover, this therapeutic intervention has to be informed by concepts of reinforcement learning to develop its full potential. Such a refined neurofeedback approach would need to address the following issues: (1) Defining a physiological feedback target specific to the intended behavioral gain, e.g., β-band oscillations for cortico-muscular communication. This targeted brain state could well be different from the brain state optimal for the neurofeedback task, e.g., α-band oscillations for differentiating MI from rest; (2) Selecting a BCI/BMI classification and thresholding approach on the basis of learning principles, i.e., balancing challenge and reward of the neurofeedback task instead of maximizing the classification accuracy of the difficulty level device; and (3) Adjusting the difficulty level in the course of the training period to account for the cognitive load and the learning experience of the participant. Here, we propose a comprehensive neurofeedback strategy for motor restoration after stroke that addresses these aspects, and provide evidence for the feasibility of the suggested approach by demonstrating that dynamic threshold adaptation based on reinforcement learning may lead to frequency-specific operant conditioning of β-band oscillations paralleled by task-specific motor improvement; a proposal that requires investigation in a larger cohort of stroke patients.
Keywords: beta oscillations; brain-computer interface; brain-machine interface; brain-robot interface; functional restoration; hand function; reinforcement learning; stroke.
Figures
Similar articles
-
Reinforcement learning of self-regulated sensorimotor β-oscillations improves motor performance.Neuroimage. 2016 Jul 1;134:142-152. doi: 10.1016/j.neuroimage.2016.03.016. Epub 2016 Apr 2. Neuroimage. 2016. PMID: 27046109 Clinical Trial.
-
Rewiring Cortico-Muscular Control in the Healthy and Poststroke Human Brain with Proprioceptive β-Band Neurofeedback.J Neurosci. 2022 Sep 7;42(36):6861-6877. doi: 10.1523/JNEUROSCI.1530-20.2022. J Neurosci. 2022. PMID: 35940874 Free PMC article.
-
What is the optimal task difficulty for reinforcement learning of brain self-regulation?Clin Neurophysiol. 2016 Sep;127(9):3033-3041. doi: 10.1016/j.clinph.2016.06.016. Epub 2016 Jun 25. Clin Neurophysiol. 2016. PMID: 27472538
-
Determining optimal mobile neurofeedback methods for motor neurorehabilitation in children and adults with non-progressive neurological disorders: a scoping review.J Neuroeng Rehabil. 2022 Sep 28;19(1):104. doi: 10.1186/s12984-022-01081-9. J Neuroeng Rehabil. 2022. PMID: 36171602 Free PMC article.
-
Volitional Control of Brain Motor Activity and Its Therapeutic Potential.Neuromodulation. 2022 Dec;25(8):1187-1196. doi: 10.1016/j.neurom.2022.01.007. Epub 2022 Feb 28. Neuromodulation. 2022. PMID: 35241365 Review.
Cited by
-
EEG decoding with spatiotemporal convolutional neural network for visualization and closed-loop control of sensorimotor activities: A simultaneous EEG-fMRI study.Hum Brain Mapp. 2024 Jun 15;45(9):e26767. doi: 10.1002/hbm.26767. Hum Brain Mapp. 2024. PMID: 38923184 Free PMC article.
-
Design and Optimization of an EEG-Based Brain Machine Interface (BMI) to an Upper-Limb Exoskeleton for Stroke Survivors.Front Neurosci. 2016 Mar 31;10:122. doi: 10.3389/fnins.2016.00122. eCollection 2016. Front Neurosci. 2016. PMID: 27065787 Free PMC article.
-
Design and Evaluation of a Custom-Made Electromyographic Biofeedback System for Facial Rehabilitation.Front Neurosci. 2022 Mar 4;16:666173. doi: 10.3389/fnins.2022.666173. eCollection 2022. Front Neurosci. 2022. PMID: 35310106 Free PMC article.
-
Markov Switching Model for Quick Detection of Event Related Desynchronization in EEG.Front Neurosci. 2018 Feb 1;12:24. doi: 10.3389/fnins.2018.00024. eCollection 2018. Front Neurosci. 2018. PMID: 29449799 Free PMC article.
-
State-Dependent Gain Modulation of Spinal Motor Output.Front Bioeng Biotechnol. 2020 Oct 2;8:523866. doi: 10.3389/fbioe.2020.523866. eCollection 2020. Front Bioeng Biotechnol. 2020. PMID: 33117775 Free PMC article.
References
-
- Allal L., Pelgrims Ducrey G. (2000). Assessment of—or in—the zone of proximal development. Learn. Instr. 10, 137–152. 10.1016/s0959-4752(99)00025-0 - DOI
-
- Ang K. K., Guan C., Chua K. S. G., Ang B. T., Kuah C., Wang C., et al. . (2010). Clinical study of neurorehabilitation in stroke using EEG-based motor imagery brain-computer interface with robotic feedback. Conf. Proc. IEEE Eng. Med. Biol. Soc. 2010, 5549–5552. 10.1109/IEMBS.2010.5626782 - DOI - PubMed
LinkOut - more resources
Full Text Sources
Other Literature Sources