

Quantifying effects of stochasticity in reference frame transformations on posterior distributions
- PMID: 26190998
- PMCID: PMC4490245
- DOI: 10.3389/fncom.2015.00082
Quantifying effects of stochasticity in reference frame transformations on posterior distributions
Abstract
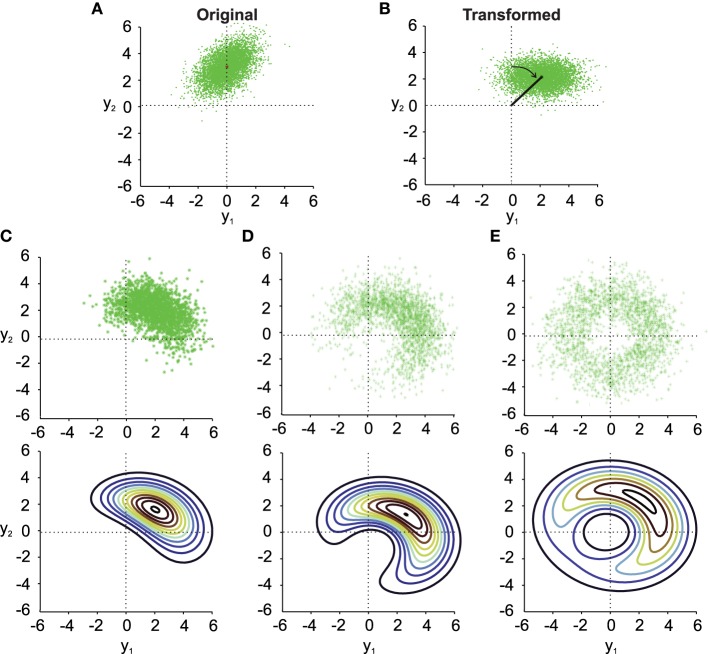
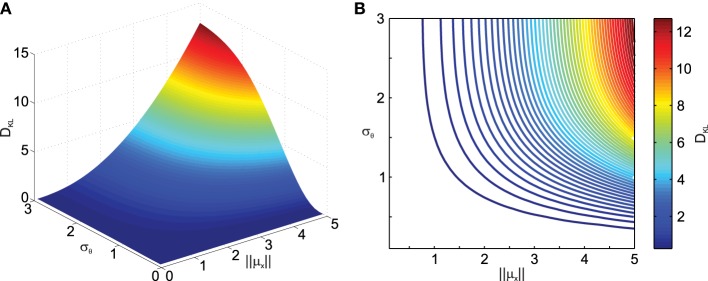
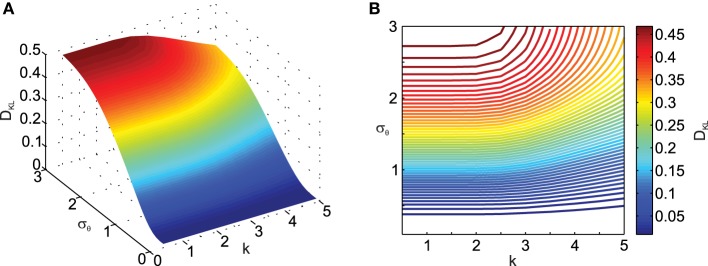
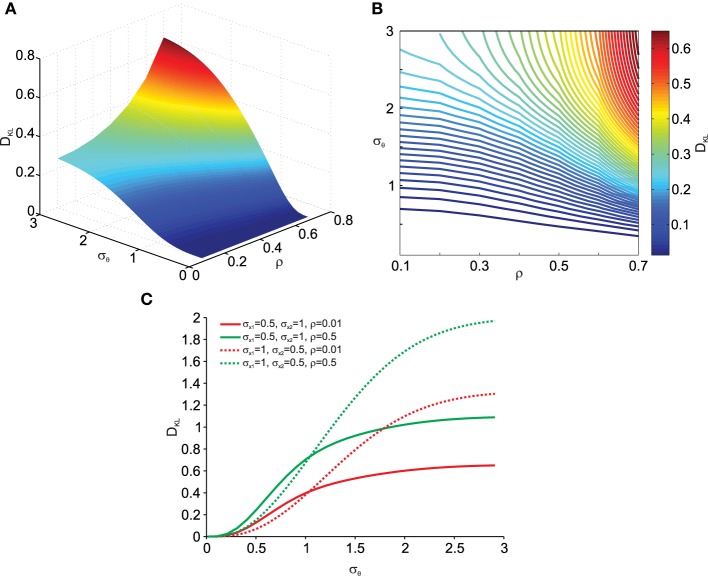
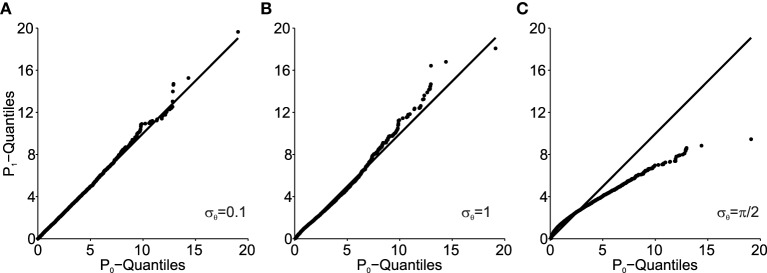
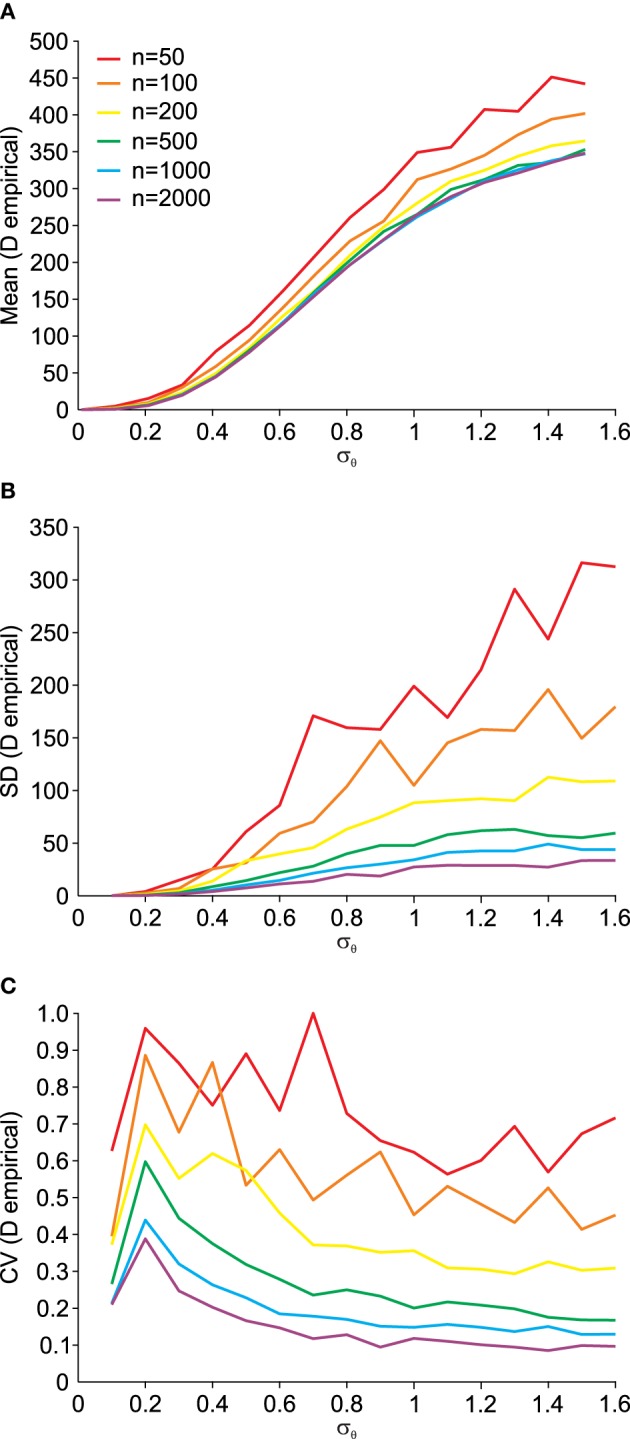
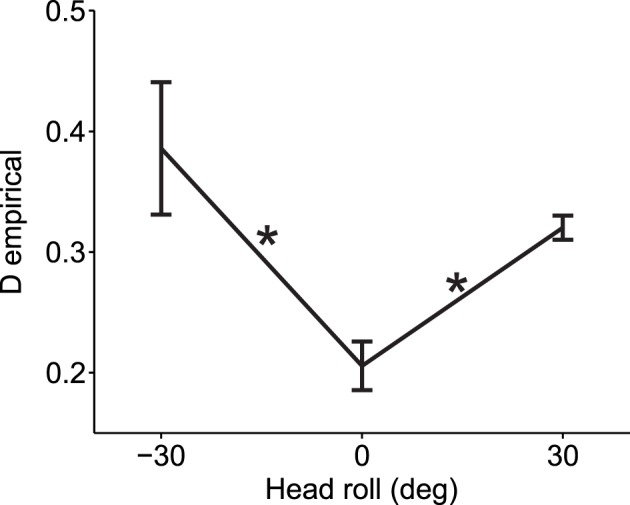
Reference frame transformations are usually considered to be deterministic. However, translations, scaling or rotation angles could be stochastic. Indeed, variability of these entities often originates from noisy estimation processes. The impact of transformation noise on the statistics of the transformed signals is unknown and a quantification of these effects is the goal of this study. We first quantify analytically and numerically how stochastic reference frame transformations (SRFT) alter the posterior distribution of the transformed signals. We then propose an new empirical measure to quantify deviations from a given distribution when only limited data is available. We apply this empirical measure to an example in sensory-motor neuroscience to quantify how different head roll angles change the distribution of reach endpoints away from the normal distribution.
Keywords: Stochastic noise; deviation from normality; reaching; reference frame transformation; sensory-motor transformation.
Figures
References
-
- Burdenski T. K. (2000). Evaluating univariate, bivariate, and multivariate normality using graphical procedures. Mult. Lin. Regression Viewpoints 26, 15–28.
LinkOut - more resources
Full Text Sources
Other Literature Sources