

Quantification of gait parameters in freely walking rodents
- PMID: 26197889
- PMCID: PMC4511453
- DOI: 10.1186/s12915-015-0154-0
Quantification of gait parameters in freely walking rodents
Abstract
Background: Qualitative and quantitative measurements of motor performance are essential for characterizing perturbations of motor systems. Although several methods exist for analyzing specific motor tasks, few behavioral assays are readily available to researchers that provide a complete set of kinematic parameters in rodents.
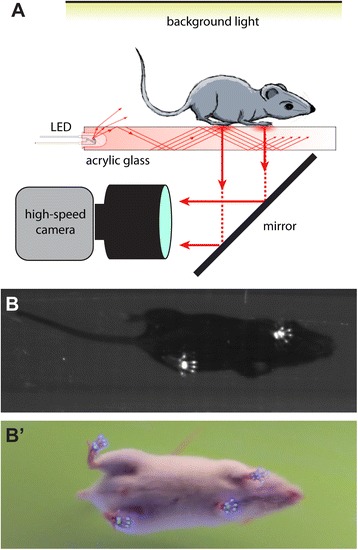
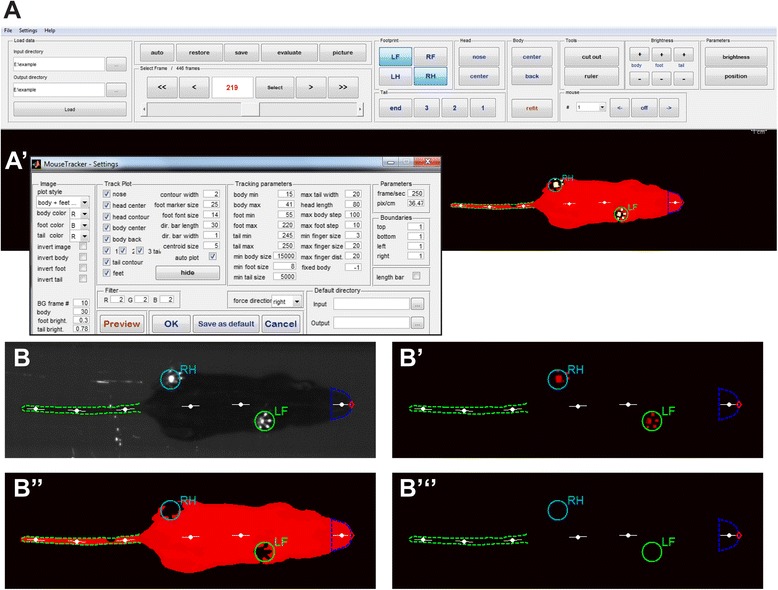
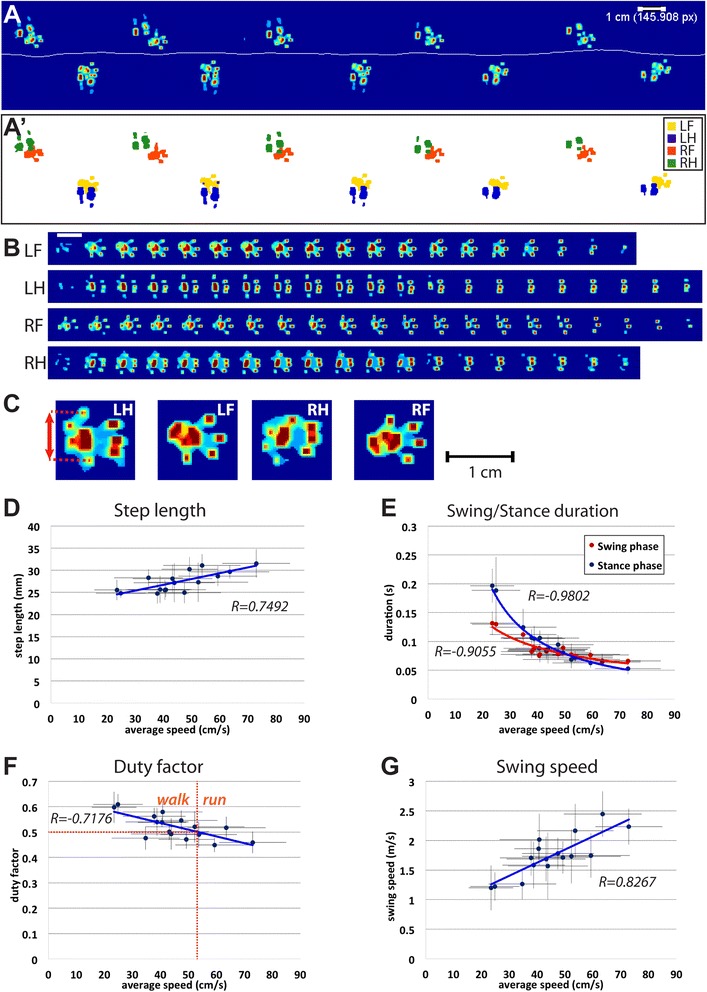
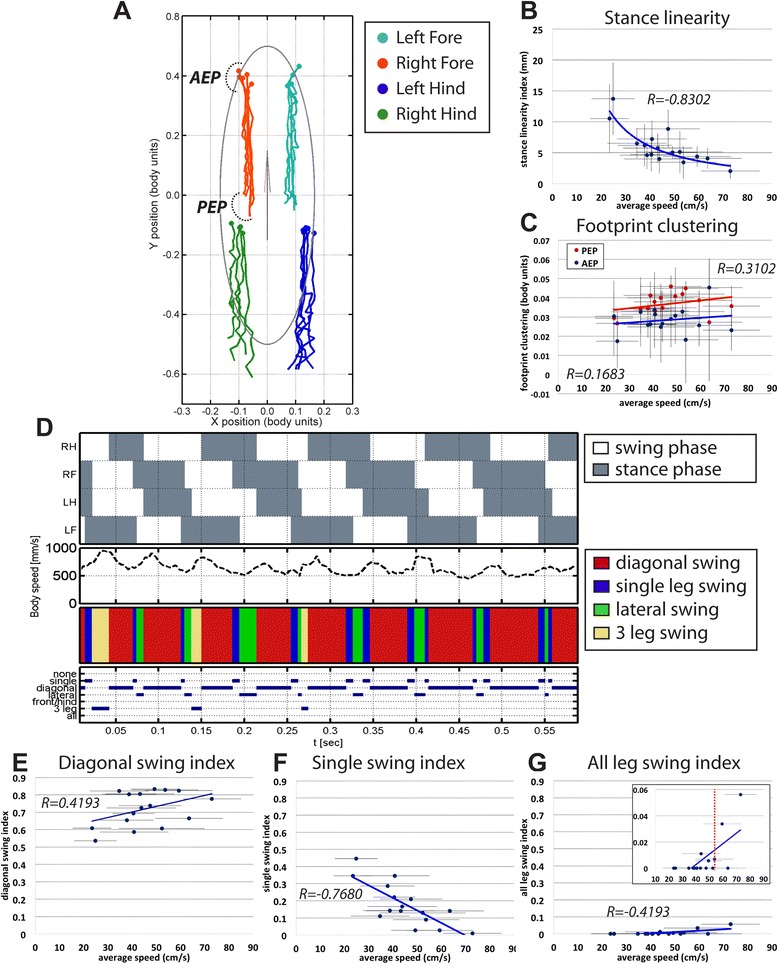
Results: Here we present MouseWalker, an integrated hardware and software system that provides a comprehensive and quantitative description of kinematic features in freely walking rodents. Footprints are visualized with high spatial and temporal resolution by a non-invasive optical touch sensor coupled to high-speed imaging. A freely available and open-source software package tracks footprints and body features to generate a comprehensive description of many locomotion features, including static parameters such as footprint position and stance patterns and dynamic parameters, such as step and swing cycle duration, and inter-leg coordination. Using this method, we describe walking by wild-type mice including several previously undescribed parameters. For example, we demonstrate that footprint touchdown occurs instantaneously by the entire paw with no obvious rostral-caudal or lateral-medial bias.
Conclusions: The readily available MouseWalker system and the large set of readouts it generates greatly increases the currently available toolkit for the analysis of wild type and aberrant locomotion in rodents.
Figures
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
