

Inducing hindlimb locomotor recovery in adult rat after complete thoracic spinal cord section using repeated treadmill training with perineal stimulation only
- PMID: 26203108
- PMCID: PMC4579296
- DOI: 10.1152/jn.00416.2015
Inducing hindlimb locomotor recovery in adult rat after complete thoracic spinal cord section using repeated treadmill training with perineal stimulation only
Abstract
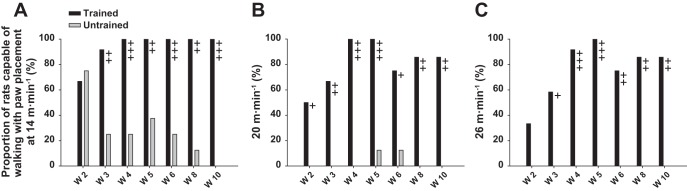
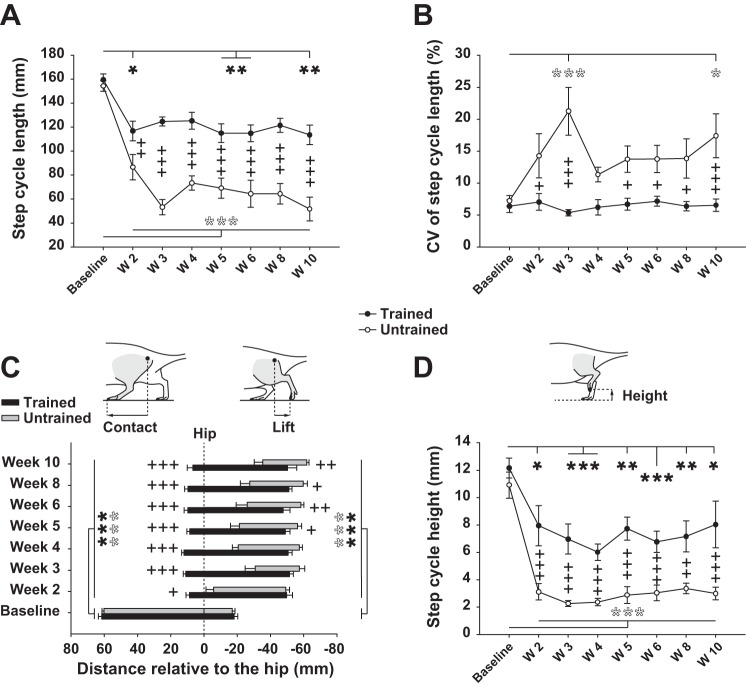
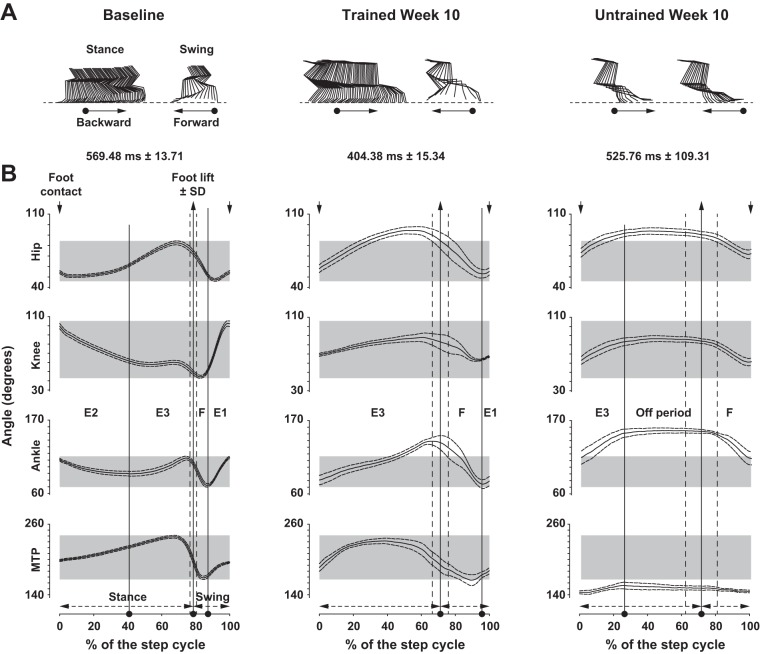
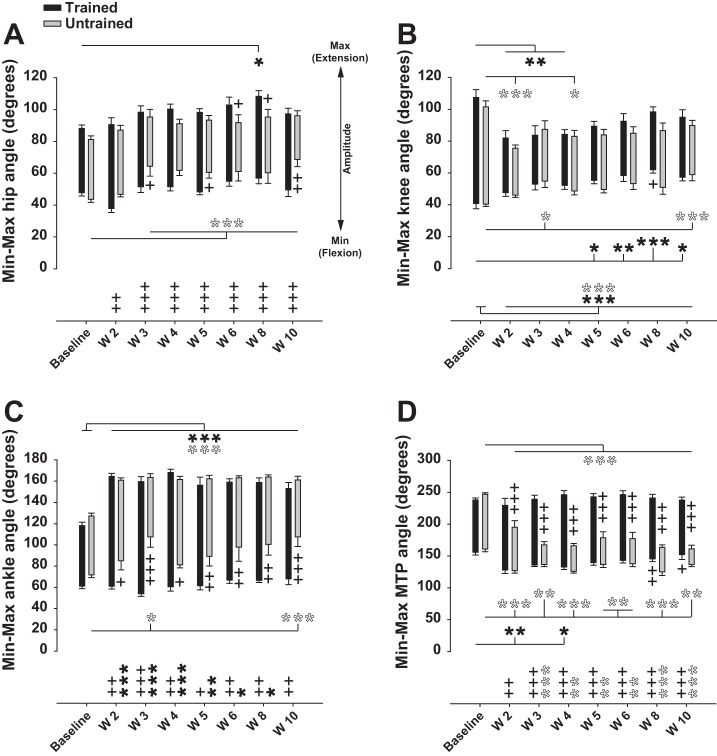
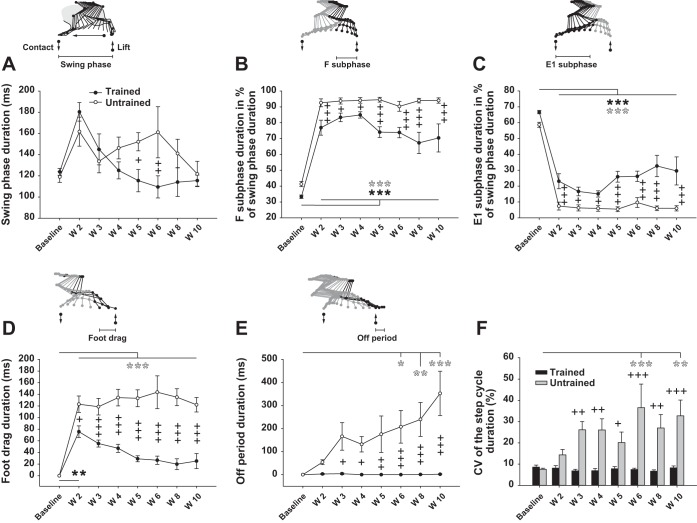
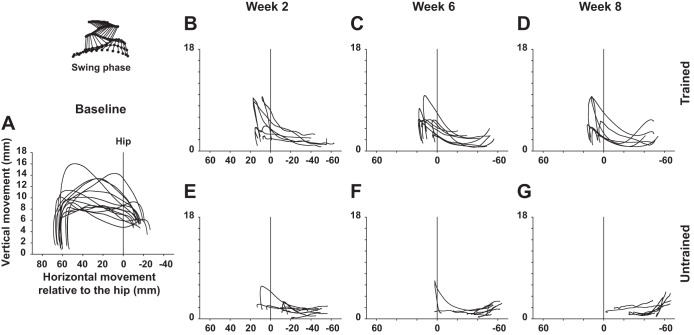
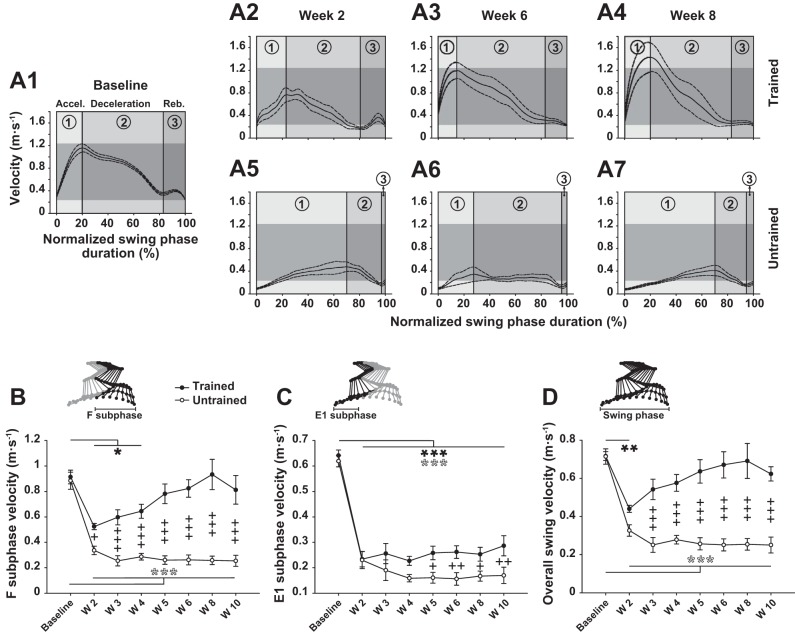
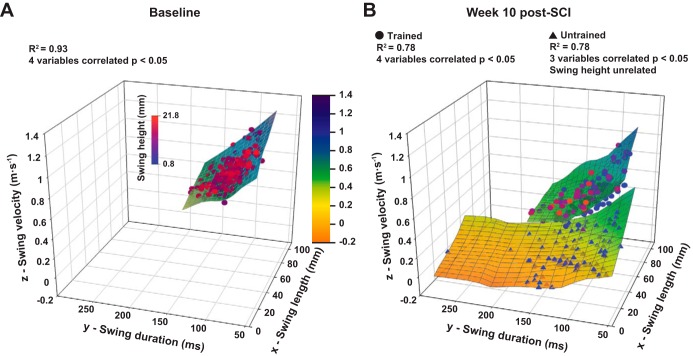
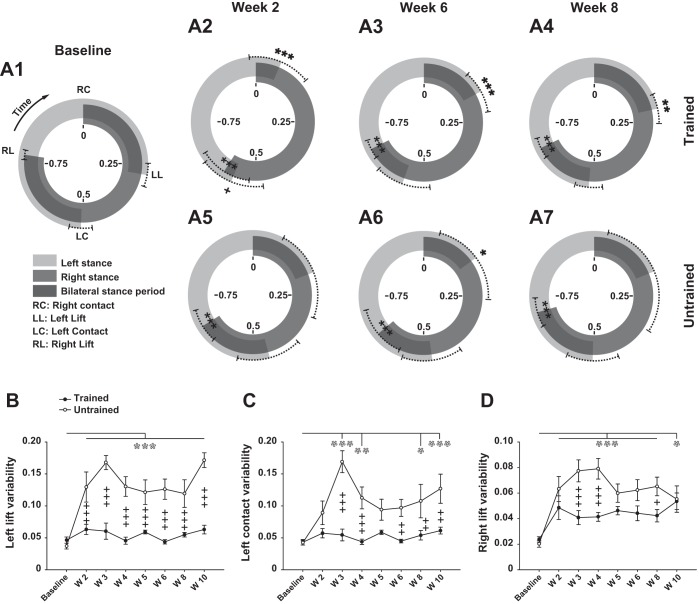
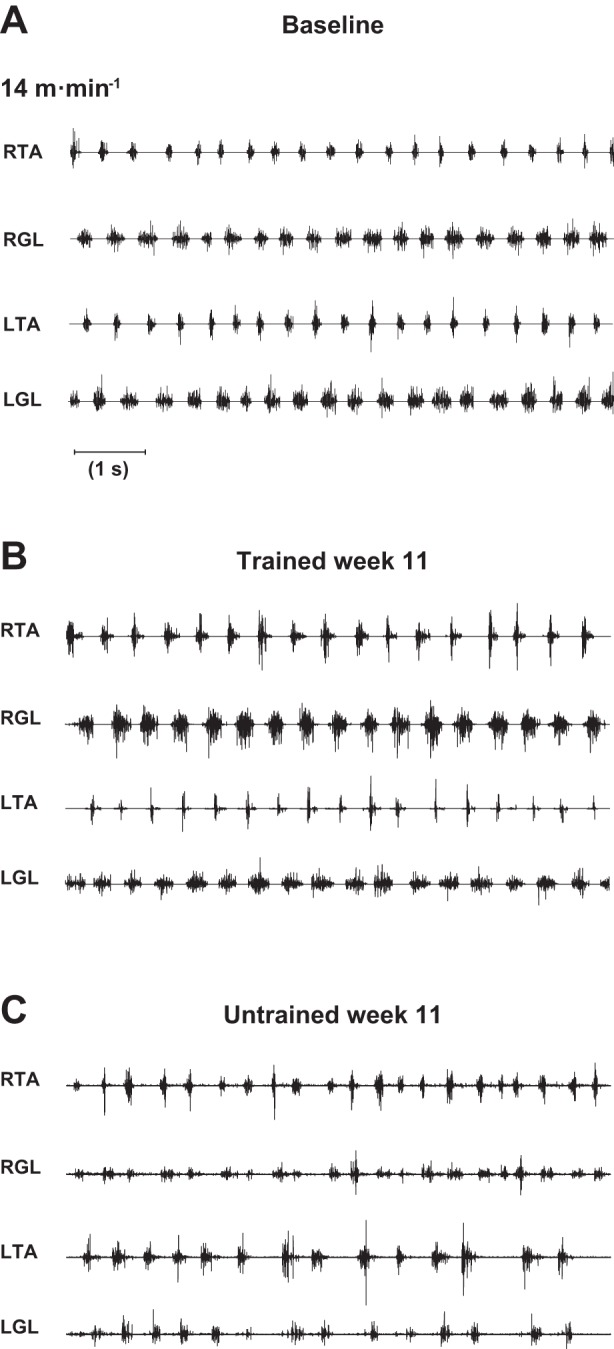
Although a complete thoracic spinal cord section in various mammals induces paralysis of voluntary movements, the spinal lumbosacral circuitry below the lesion retains its ability to generate hindlimb locomotion. This important capacity may contribute to the overall locomotor recovery after partial spinal cord injury (SCI). In rats, it is usually triggered by pharmacological and/or electrical stimulation of the cord while a robot sustains the animals in an upright posture. In the present study we daily trained a group of adult spinal (T7) rats to walk with the hindlimbs for 10 wk (10 min/day for 5 days/wk), using only perineal stimulation. Kinematic analysis and terminal electromyographic recordings revealed a strong effect of training on the reexpression of hindlimb locomotion. Indeed, trained animals gradually improved their locomotion while untrained animals worsened throughout the post-SCI period. Kinematic parameters such as averaged and instant swing phase velocity, step cycle variability, foot drag duration, off period duration, and relationship between the swing features returned to normal values only in trained animals. The present results clearly demonstrate that treadmill training alone, in a normal horizontal posture, elicited by noninvasive perineal stimulation is sufficient to induce a persistent hindlimb locomotor recovery without the need for more complex strategies. This provides a baseline level that should be clearly surpassed if additional locomotor-enabling procedures are added. Moreover, it has a clinical value since intrinsic spinal reorganization induced by training should contribute to improve locomotor recovery together with afferent feedback and supraspinal modifications in patients with incomplete SCI.
Keywords: kinematics; locomotion; neuroplasticity; rat; spinal cord injury.
Copyright © 2015 the American Physiological Society.
Figures
References
-
- Alluin O, Delivet-Mongrain H, Gauthier MK, Fehlings MG, Rossignol S, Karimi-Abdolrezaee S. Examination of the combined effects of chondroitinase ABC, growth factors and locomotor training following compressive spinal cord injury on neuroanatomical plasticity and kinematics. PLoS One 9: e111072, 2014. - PMC - PubMed
-
- Alluin O, Karimi-Abdolrezaee S, Delivet-Mongrain H, Leblond H, Fehlings MG, Rossignol S. Kinematic study of locomotor recovery after spinal cord clip compression injury in rats. J Neurotrauma 28: 1963–1981, 2011. - PubMed
-
- Antri M, Barthe JY, Mouffle C, Orsal D. Long-lasting recovery of locomotor function in chronic spinal rat following chronic combined pharmacological stimulation of serotonergic receptors with 8-OHDPAT and quipazine. Neurosci Lett 384: 162–167, 2005. - PubMed
-
- Antri M, Orsal D, Barthe JY. Locomotor recovery in the chronic spinal rat: effects of long-term treatment with a 5-HT2 agonist. In: Spinal Cord Trauma: Regeneration, Neural Repair and Functional Recovery, edited by McKerracher L, Doucet G, Rossignol S. Amsterdam: Elsevier Science, 2002, p. 467–476. - PubMed
-
- Barbeau H, Bédard P. Denervation supersensitivity to 5-HT in rats following spinal transection and 5,7 dihydroxytryptamine injection. Neuropharmacology 20: 611–616, 1981. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical