

Non-parametric representation and prediction of single- and multi-shell diffusion-weighted MRI data using Gaussian processes
- PMID: 26236030
- PMCID: PMC4627362
- DOI: 10.1016/j.neuroimage.2015.07.067
Non-parametric representation and prediction of single- and multi-shell diffusion-weighted MRI data using Gaussian processes
Abstract
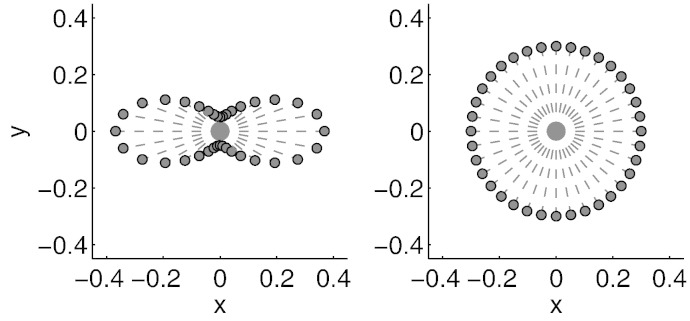
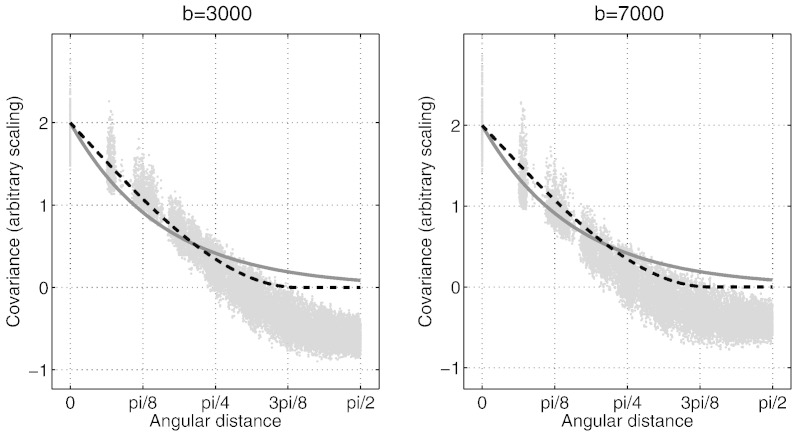
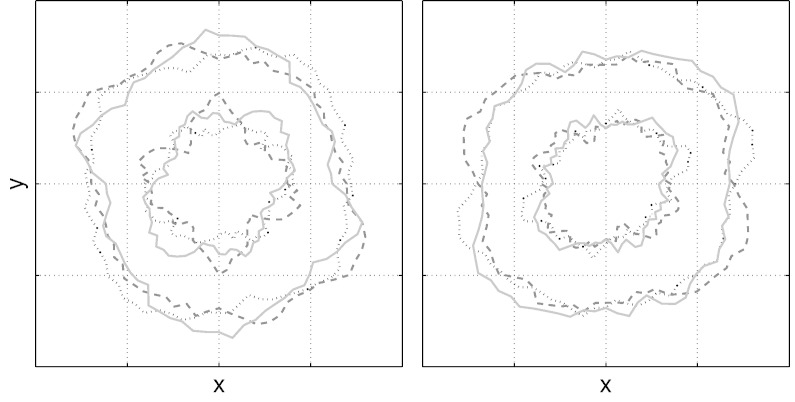
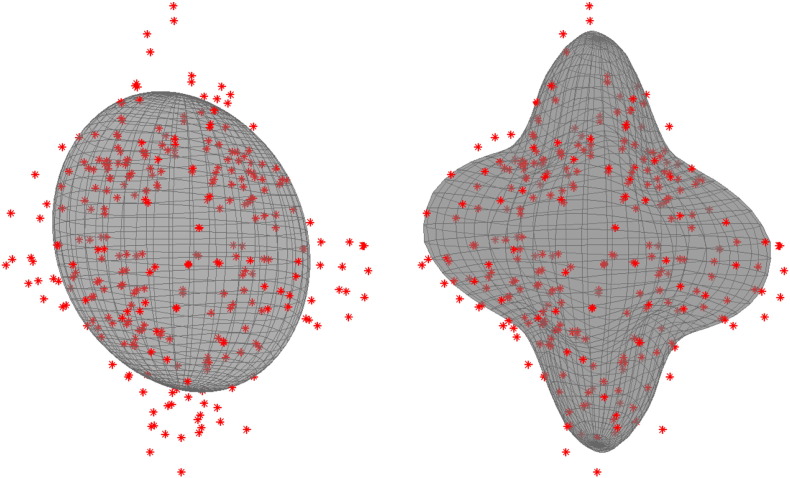
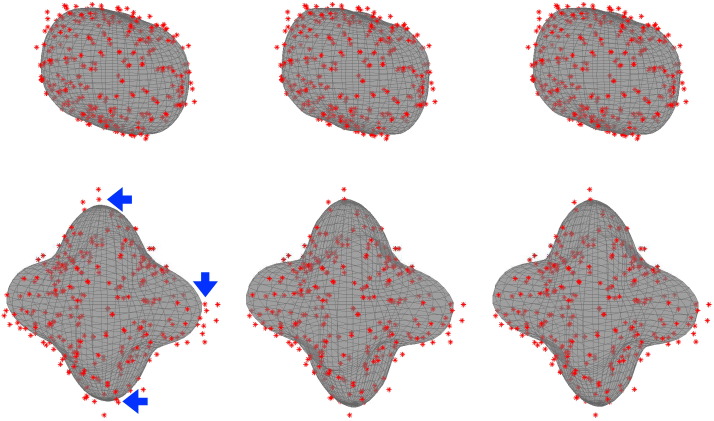
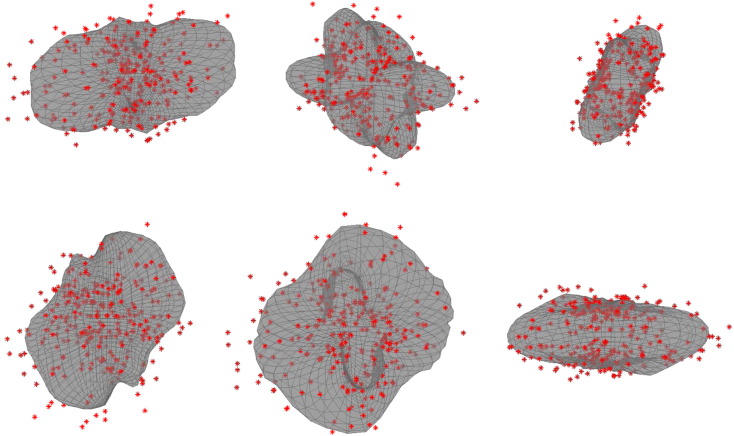
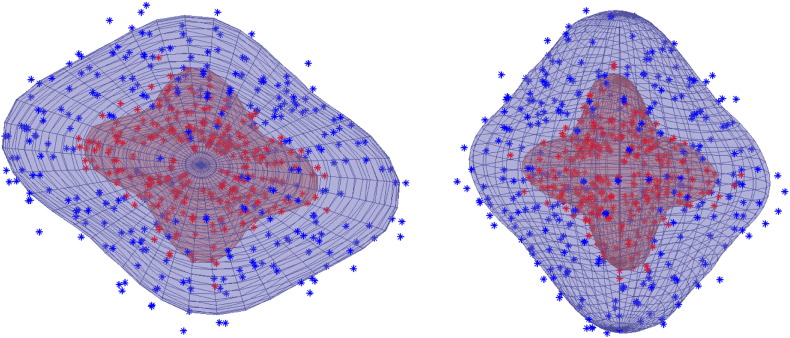
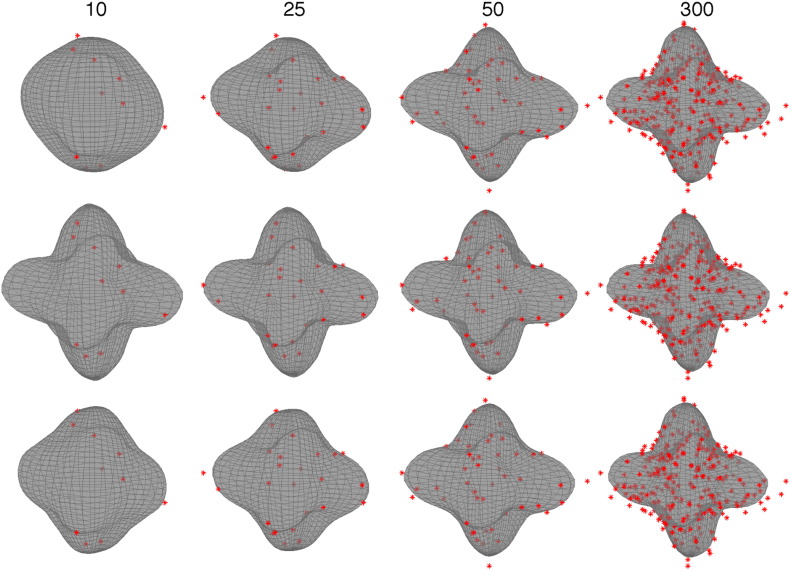
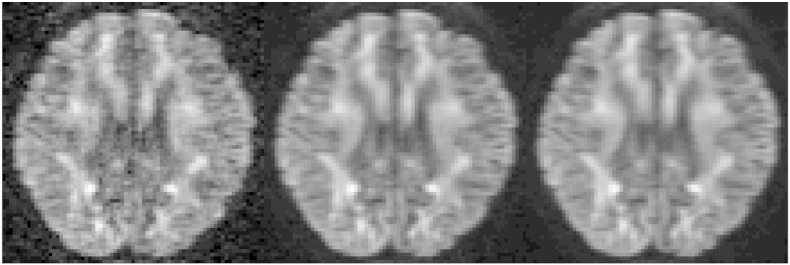
Diffusion MRI offers great potential in studying the human brain microstructure and connectivity. However, diffusion images are marred by technical problems, such as image distortions and spurious signal loss. Correcting for these problems is non-trivial and relies on having a mechanism that predicts what to expect. In this paper we describe a novel way to represent and make predictions about diffusion MRI data. It is based on a Gaussian process on one or several spheres similar to the Geostatistical method of "Kriging". We present a choice of covariance function that allows us to accurately predict the signal even from voxels with complex fibre patterns. For multi-shell data (multiple non-zero b-values) the covariance function extends across the shells which means that data from one shell is used when making predictions for another shell.
Keywords: Diffusion MRI; Gaussian process; Multi-shell; Non-parametric representation.
Copyright © 2015. Published by Elsevier Inc.
Figures
References
-
- Alexander A.L., Wu Y.-C., Venkat P.C. Hybrid diffusion imaging (HYDI) Magn. Reson. Med. 2006;380(2):1016–1021. - PubMed
-
- Andersson J.L.R., Skare S. A model-based method for retrospective correction of geometric distortions in diffusion-weighted EPI. NeuroImage. 2002;16:177–199. - PubMed
-
- Andersson J.L.R., Skare S. Chapter 17: image distortion and its correction in diffusion MRI. In: Jones D.K., editor. Diffusion MRI: Theory, Methods, and Applications. Oxford University Press; Oxford, United Kingdom: 2011. pp. 285–302.
-
- Andersson J.L.R., Sotiropoulos S. Joint Annual Meeting ISMRM-ESMRMB. 2014. A gaussian process based method for detecting and correcting dropout in diffusion imaging; p. 2567.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
