

Learning to expect the unexpected: rapid updating in primate cerebellum during voluntary self-motion
- PMID: 26237366
- PMCID: PMC6102711
- DOI: 10.1038/nn.4077
Learning to expect the unexpected: rapid updating in primate cerebellum during voluntary self-motion
Abstract
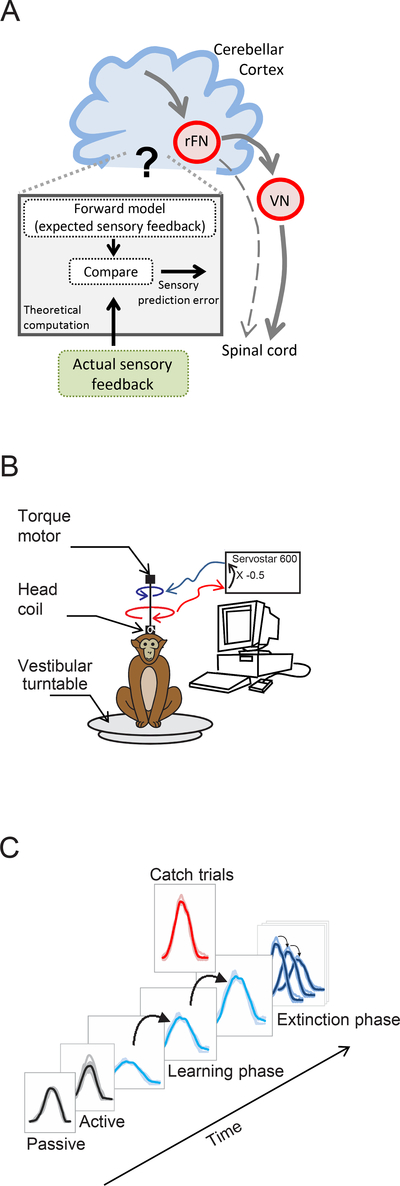
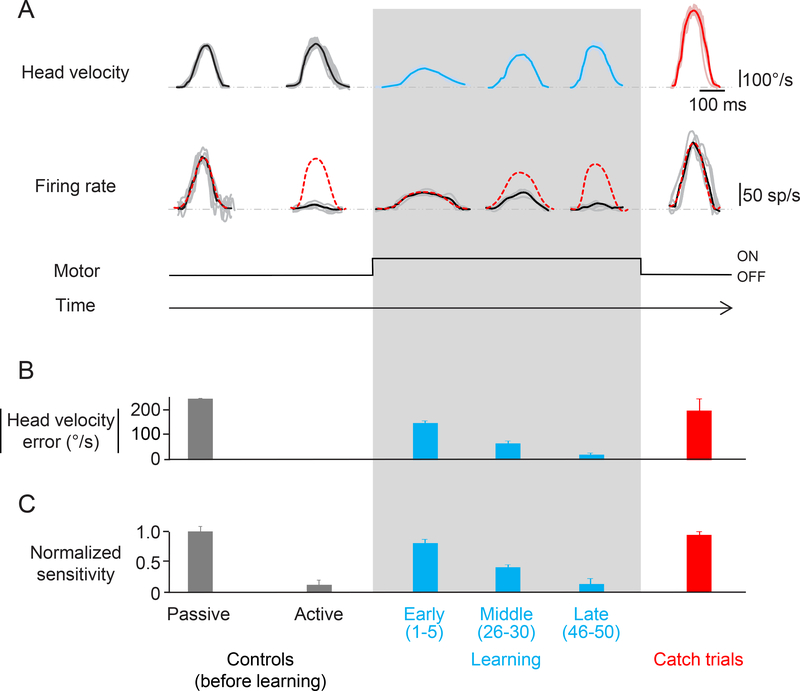
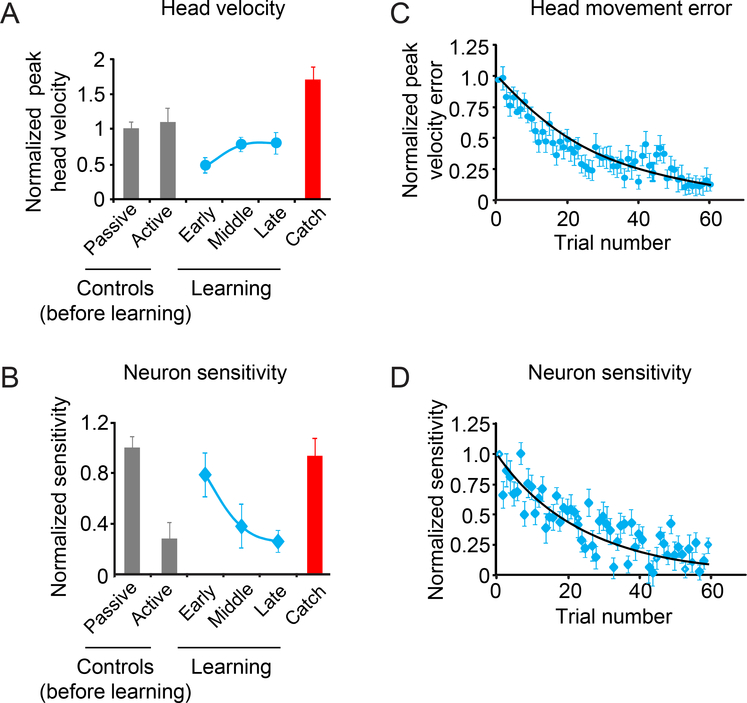
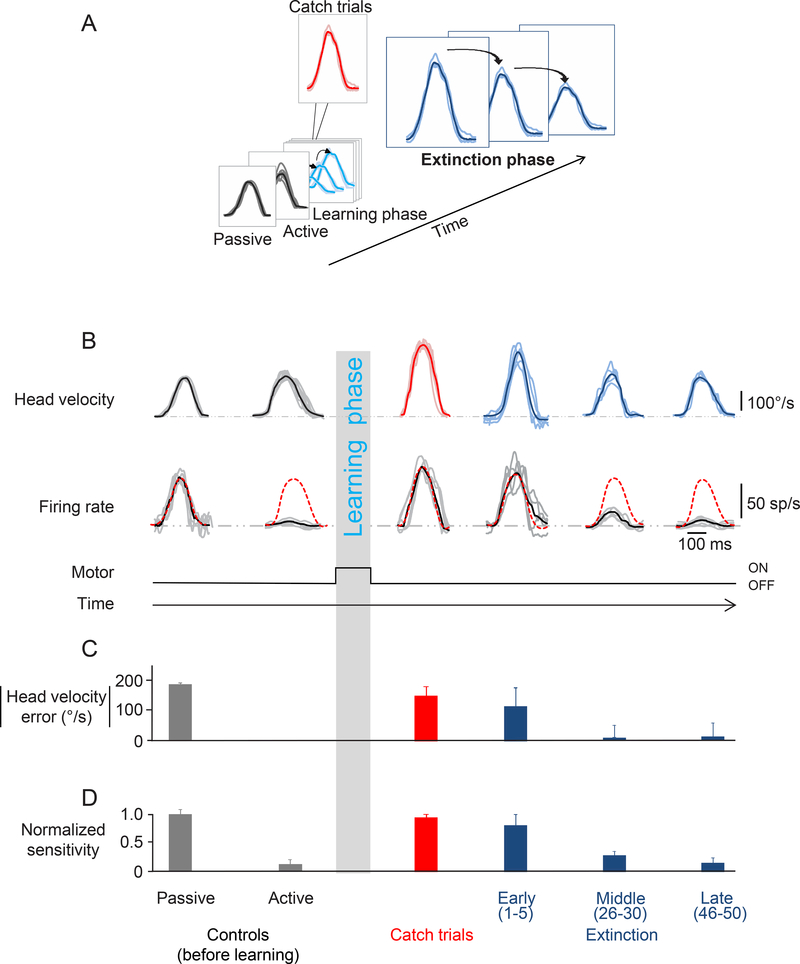
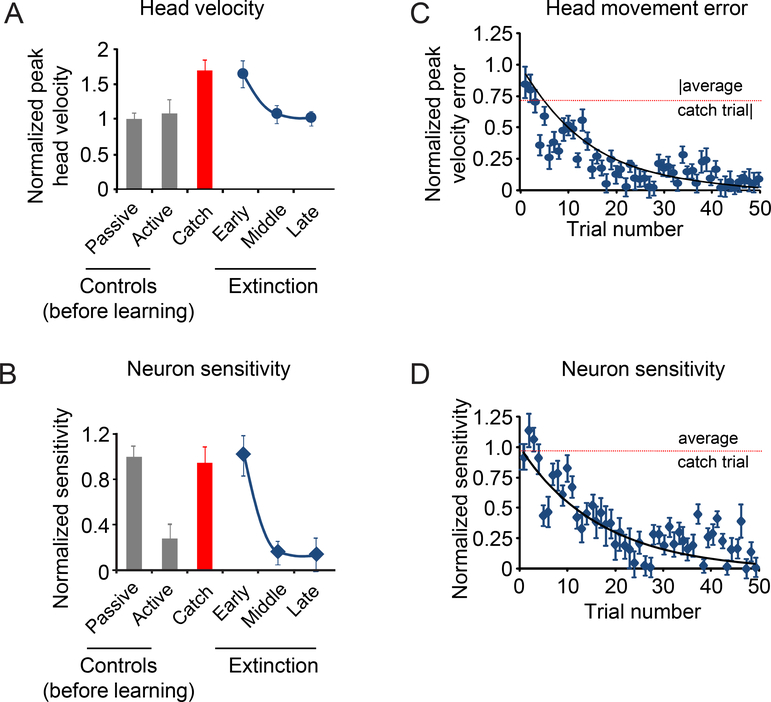
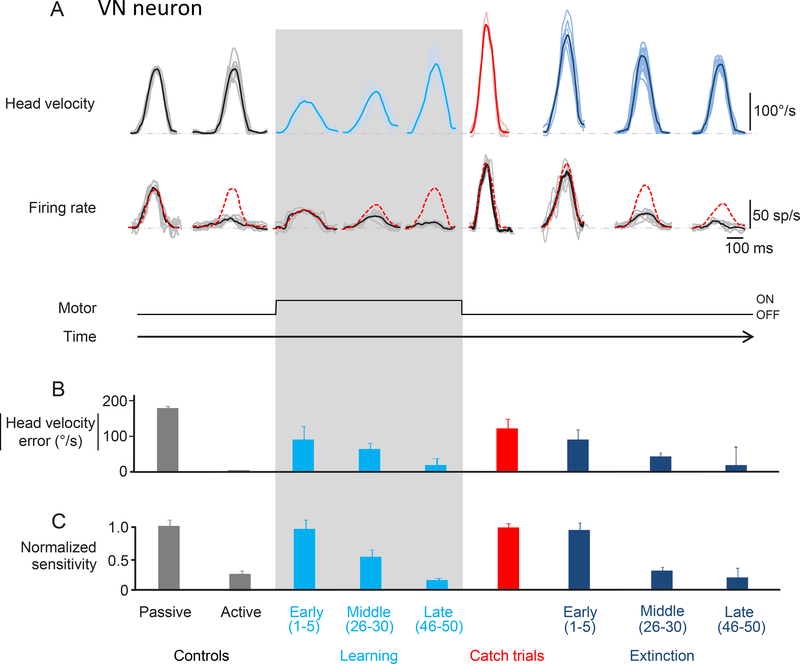
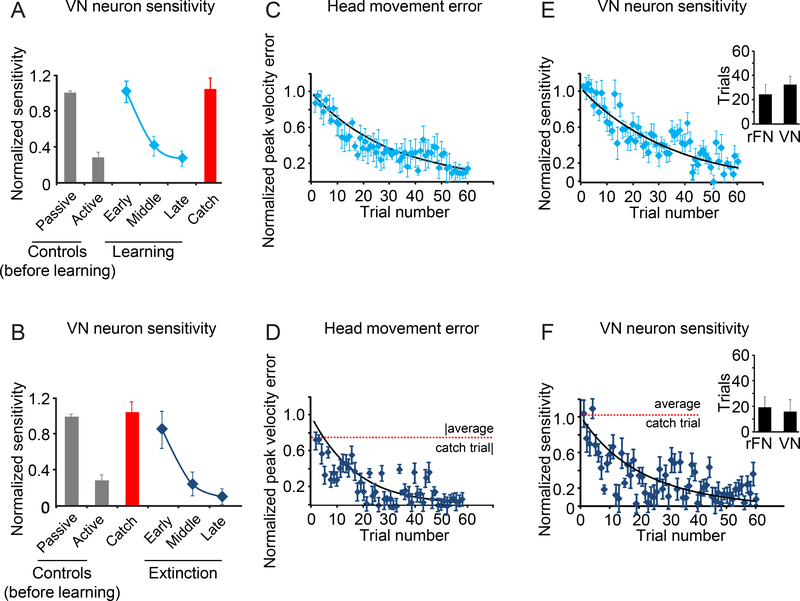
There is considerable evidence that the cerebellum has a vital role in motor learning by constructing an estimate of the sensory consequences of movement. Theory suggests that this estimate is compared with the actual feedback to compute the sensory prediction error. However, direct proof for the existence of this comparison is lacking. We carried out a trial-by-trial analysis of cerebellar neurons during the execution and adaptation of voluntary head movements and found that neuronal sensitivities dynamically tracked the comparison of predictive and feedback signals. When the relationship between the motor command and resultant movement was altered, neurons robustly responded to sensory input as if the movement was externally generated. Neuronal sensitivities then declined with the same time course as the concurrent behavioral learning. These findings demonstrate the output of an elegant computation in which rapid updating of an internal model enables the motor system to learn to expect unexpected sensory inputs.
Figures
References
-
- Bhushan N & Shadmehr R Computational nature of human adaptive control during learning of reaching movements in force fields. Biological cybernetics 81, 39–60 (1999). - PubMed
-
- Kawato M Internal models for motor control and trajectory planning. Current opinion in neurobiology 9, 718–727 (1999). - PubMed
-
- Shadmehr R, Smith MA & Krakauer JW Error correction, sensory prediction, and adaptation in motor control. Annual review of neuroscience 33, 89–108 (2010). - PubMed
-
- Wolpert DM & Ghahramani Z Computational principles of movement neuroscience. Nature neuroscience 3 Suppl, 1212–1217 (2000). - PubMed
-
- Wolpert DM & Miall RC Forward Models for Physiological Motor Control. Neural networks : the official journal of the International Neural Network Society 9, 1265–1279 (1996). - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Molecular Biology Databases
