

Spatiotemporal Form Integration: sequentially presented inducers can lead to representations of stationary and rigidly rotating objects
- PMID: 26269386
- PMCID: PMC4856480
- DOI: 10.3758/s13414-015-0967-5
Spatiotemporal Form Integration: sequentially presented inducers can lead to representations of stationary and rigidly rotating objects
Abstract
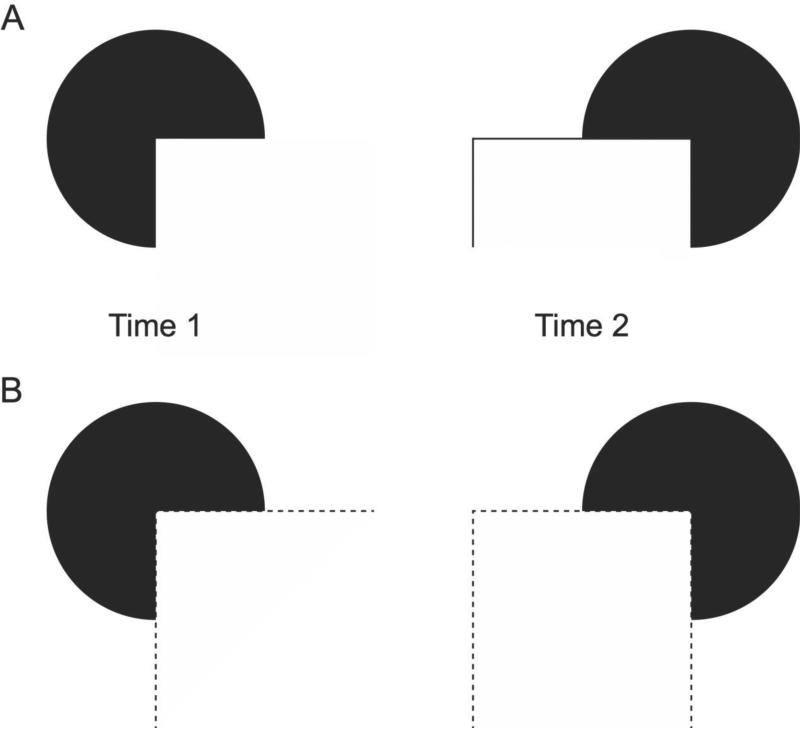
Objects in the world often are occluded and in motion. The visible fragments of such objects are revealed at different times and locations in space. To form coherent representations of the surfaces of these objects, the visual system must integrate local form information over space and time. We introduce a new illusion in which a rigidly rotating square is perceived on the basis of sequentially presented Pacman inducers. The illusion highlights two fundamental processes that allow us to perceive objects whose form features are revealed over time: Spatiotemporal Form Integration (STFI) and Position Updating. STFI refers to the spatial integration of persistent representations of local form features across time. Position updating of these persistent form representations allows them to be integrated into a rigid global motion percept. We describe three psychophysical experiments designed to identify spatial and temporal constraints that underlie these two processes and a fourth experiment that extends these findings to more ecologically valid stimuli. Our results indicate that although STFI can occur across relatively long delays between successive inducers (i.e., greater than 500 ms), position updating is limited to a more restricted temporal window (i.e., ~300 ms or less), and to a confined range of spatial (mis)alignment. These findings lend insight into the limits of mechanisms underlying the visual system's capacity to integrate transient, piecemeal form information, and support coherent object representations in the ever-changing environment.
Keywords: Form perception; Form-motion interactions; Illusory contours; Motion perception; Surface perception.
Figures






References
-
- Adelson EH, Movshon JA. Phenomenal coherence of moving visual patterns. Nature. 1982;300(5892):523–525. - PubMed
-
- Attneave F. Some informational aspects of visual perception. Psychological Review. 1954;61(3):183–193. - PubMed
-
- Biederman I. Recognition-by-components: a theory of human image understanding. Psychological Review. 1987;94(2):115. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
