

Interactional leader-follower sensorimotor communication strategies during repetitive joint actions
- PMID: 26333815
- PMCID: PMC4614476
- DOI: 10.1098/rsif.2015.0644
Interactional leader-follower sensorimotor communication strategies during repetitive joint actions
Abstract
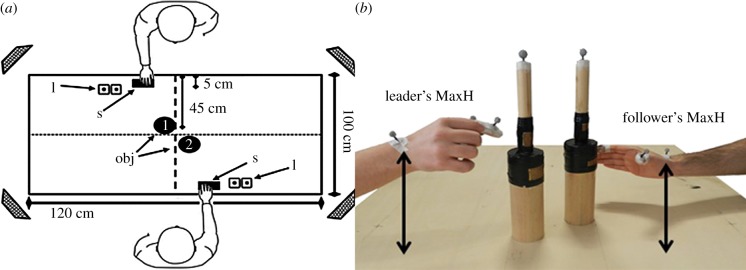
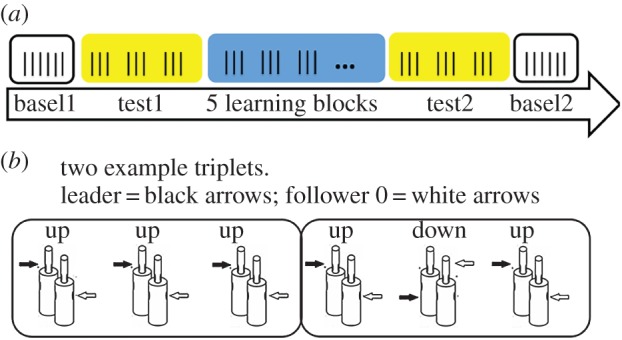
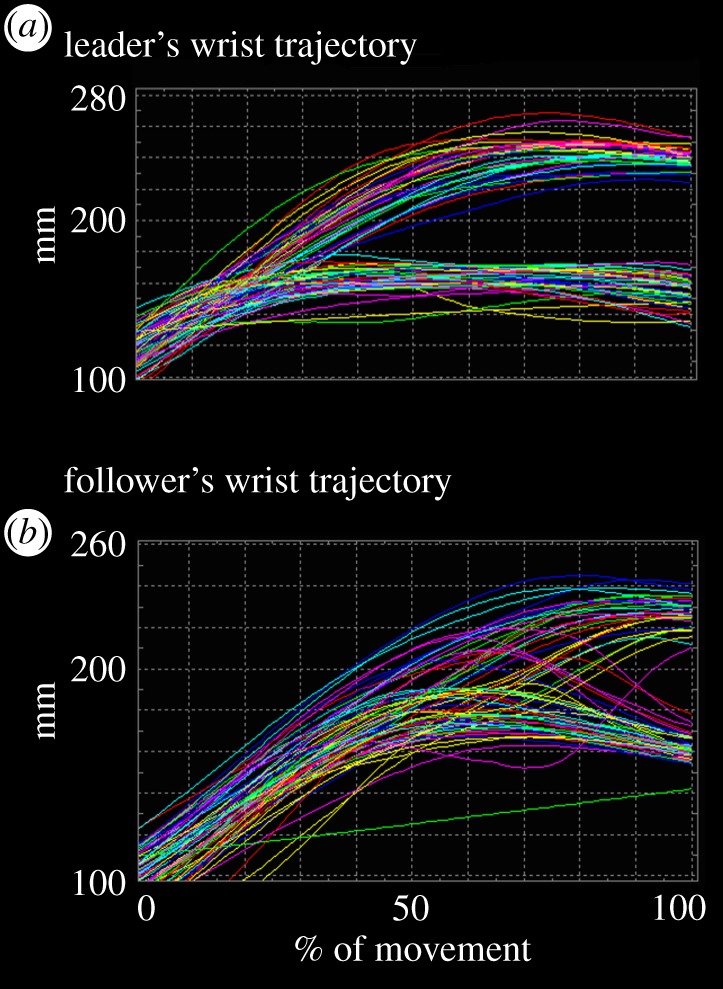
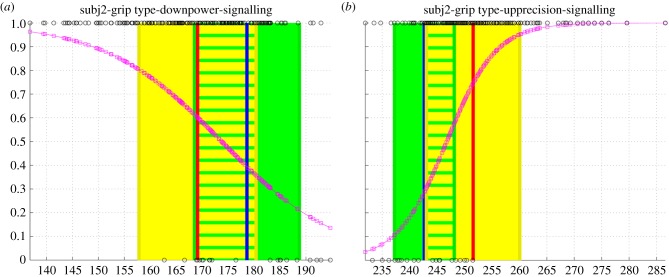
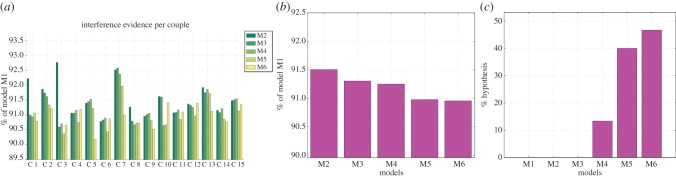
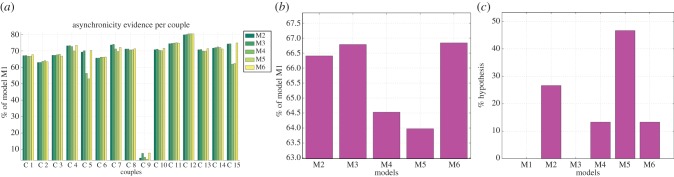
Non-verbal communication is the basis of animal interactions. In dyadic leader-follower interactions, leaders master the ability to carve their motor behaviour in order to 'signal' their future actions and internal plans while these signals influence the behaviour of follower partners, who automatically tend to imitate the leader even in complementary interactions. Despite their usefulness, signalling and imitation have a biomechanical cost, and it is unclear how this cost-benefits trade-off is managed during repetitive dyadic interactions that present learnable regularities. We studied signalling and imitation dynamics (indexed by movement kinematics) in pairs of leaders and followers during a repetitive, rule-based, joint action. Trial-by-trial Bayesian model comparison was used to evaluate the relation between signalling, imitation and pair performance. The different models incorporate different hypotheses concerning the factors (past interactions versus online movements) influencing the leader's signalling (or follower's imitation) kinematics. This approach showed that (i) leaders' signalling strategy improves future couple performance, (ii) leaders used the history of past interactions to shape their signalling, (iii) followers' imitative behaviour is more strongly affected by the online movement of the leader. This study elucidates the ways online sensorimotor communication help individuals align their task representations and ultimately improves joint action performance.
Keywords: model comparison; motor interactions; sensorimotor communication.
© 2015 The Author(s).
Figures
Similar articles
-
Adults imitate to send a social signal.Cognition. 2019 Jun;187:150-155. doi: 10.1016/j.cognition.2019.03.007. Epub 2019 Mar 13. Cognition. 2019. PMID: 30875661
-
Kinematics fingerprints of leader and follower role-taking during cooperative joint actions.Exp Brain Res. 2013 May;226(4):473-86. doi: 10.1007/s00221-013-3459-7. Epub 2013 Mar 17. Exp Brain Res. 2013. PMID: 23503771
-
Leading With Callings: Effects of Leader's Calling on Followers' Team Commitment, Voice Behavior, and Job Performance.Front Psychol. 2018 Sep 12;9:1706. doi: 10.3389/fpsyg.2018.01706. eCollection 2018. Front Psychol. 2018. PMID: 30258386 Free PMC article.
-
Timing and communication of parietal cortex for visuomotor control.Curr Opin Neurobiol. 2015 Aug;33:103-9. doi: 10.1016/j.conb.2015.03.005. Epub 2015 Apr 2. Curr Opin Neurobiol. 2015. PMID: 25841091 Review.
-
[Charisma and leadership: new challenges for psychiatry].Encephale. 2013 Dec;39(6):445-51. doi: 10.1016/j.encep.2012.10.006. Epub 2012 Dec 13. Encephale. 2013. PMID: 23246329 Review. French.
Cited by
-
Space-time mapping relationships in sensorimotor communication during asymmetric joint action.PeerJ. 2024 Jan 12;12:e16764. doi: 10.7717/peerj.16764. eCollection 2024. PeerJ. 2024. PMID: 38225929 Free PMC article.
-
Mechanisms for mutual support in motor interactions.Sci Rep. 2021 Feb 4;11(1):3060. doi: 10.1038/s41598-021-82138-y. Sci Rep. 2021. PMID: 33542259 Free PMC article.
-
Predictive Strategies for the Control of Complex Motor Skills: Recent Insights into Individual and Joint Actions.ArXiv [Preprint]. 2025 Mar 7:arXiv:2412.04191v3. ArXiv. 2025. PMID: 39679272 Free PMC article. Preprint.
-
Autistic traits affect interpersonal motor coordination by modulating strategic use of role-based behavior.Mol Autism. 2017 Jun 9;8:23. doi: 10.1186/s13229-017-0141-0. eCollection 2017. Mol Autism. 2017. PMID: 28616126 Free PMC article.
-
On the Role of Physical Interaction on Performance of Object Manipulation by Dyads.Front Hum Neurosci. 2017 Nov 7;11:533. doi: 10.3389/fnhum.2017.00533. eCollection 2017. Front Hum Neurosci. 2017. PMID: 29163109 Free PMC article.
References
-
- James W. 1890. The principles of psychology. New York, NY: Holt.
-
- Prinz W. 1997. Perception and action planning. Eur. J. Cognit. Psychol. 9, 129–154. (10.1080/713752551) - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
