

Automated measurement of mouse social behaviors using depth sensing, video tracking, and machine learning
- PMID: 26354123
- PMCID: PMC4586844
- DOI: 10.1073/pnas.1515982112
Automated measurement of mouse social behaviors using depth sensing, video tracking, and machine learning
Abstract
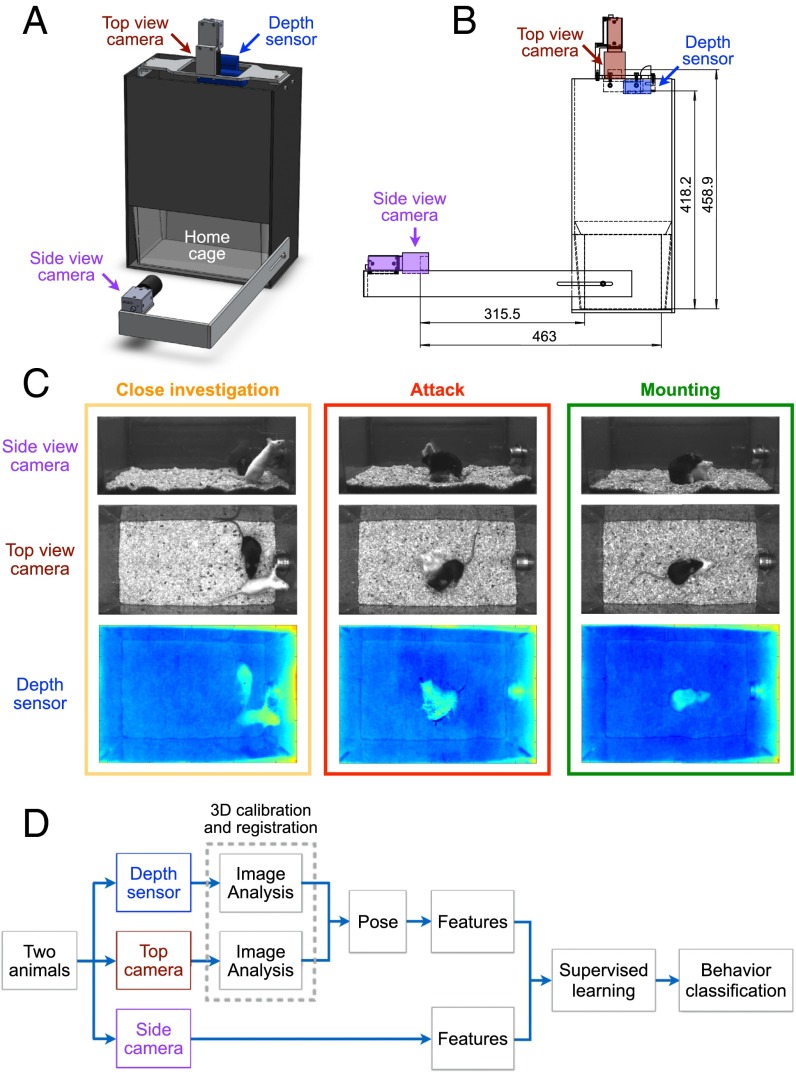
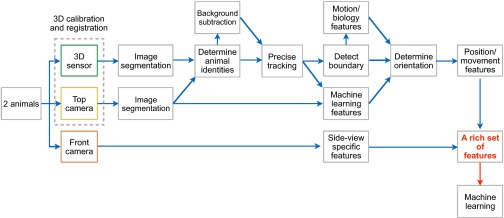
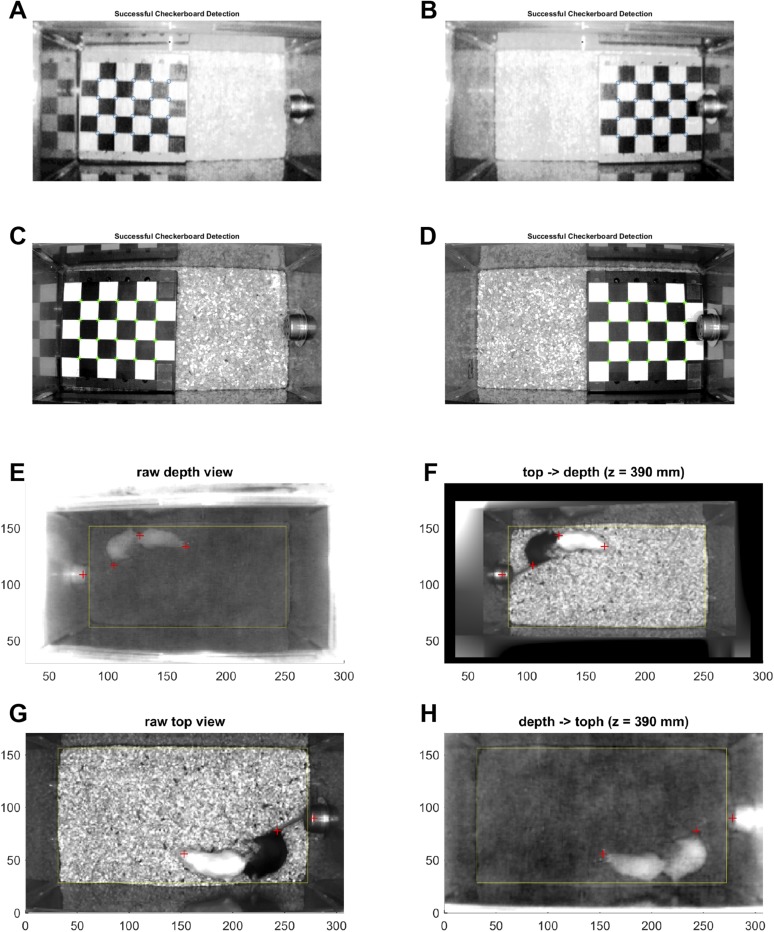
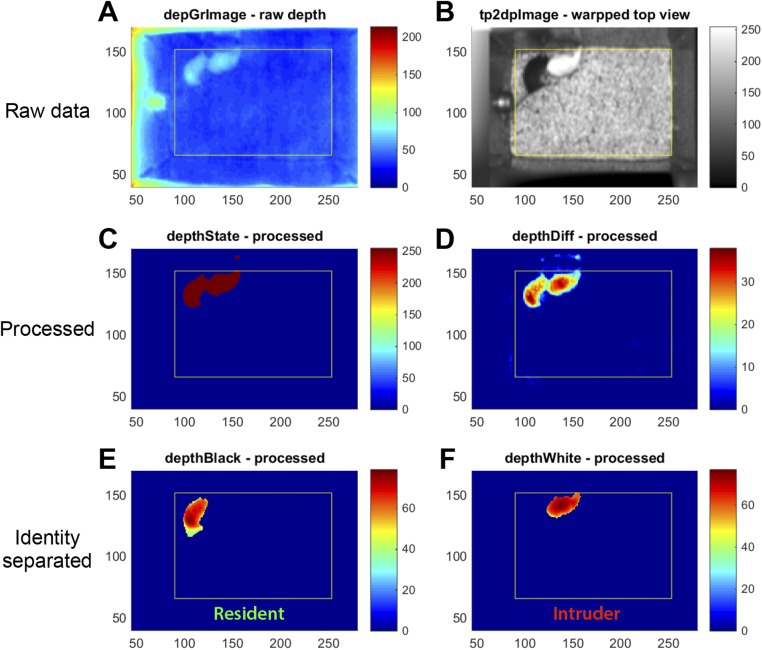
A lack of automated, quantitative, and accurate assessment of social behaviors in mammalian animal models has limited progress toward understanding mechanisms underlying social interactions and their disorders such as autism. Here we present a new integrated hardware and software system that combines video tracking, depth sensing, and machine learning for automatic detection and quantification of social behaviors involving close and dynamic interactions between two mice of different coat colors in their home cage. We designed a hardware setup that integrates traditional video cameras with a depth camera, developed computer vision tools to extract the body "pose" of individual animals in a social context, and used a supervised learning algorithm to classify several well-described social behaviors. We validated the robustness of the automated classifiers in various experimental settings and used them to examine how genetic background, such as that of Black and Tan Brachyury (BTBR) mice (a previously reported autism model), influences social behavior. Our integrated approach allows for rapid, automated measurement of social behaviors across diverse experimental designs and also affords the ability to develop new, objective behavioral metrics.
Keywords: behavioral tracking; depth sensing; machine vision; social behavior; supervised machine learning.
Conflict of interest statement
The authors declare no conflict of interest.
Figures







References
-
- Anderson DJ, Perona P. Toward a science of computational ethology. Neuron. 2014;84(1):18–31. - PubMed
-
- Gomez-Marin A, Paton JJ, Kampff AR, Costa RM, Mainen ZF. Big behavioral data: Psychology, ethology and the foundations of neuroscience. Nat Neurosci. 2014;17(11):1455–1462. - PubMed
-
- Spink AJ, Tegelenbosch RA, Buma MO, Noldus LP. 2001. The EthoVision video tracking system—A tool for behavioral phenotyping of transgenic mice. Physiol Behav 73(5):731–744.
-
- Noldus LP, Spink AJ, Tegelenbosch RA. EthoVision: A versatile video tracking system for automation of behavioral experiments. Behav Res Methods Instrum Comp. 2001;33(3):398–414. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
