

Generalization of Dexterous Manipulation Is Sensitive to the Frame of Reference in Which It Is Learned
- PMID: 26376089
- PMCID: PMC4573321
- DOI: 10.1371/journal.pone.0138258
Generalization of Dexterous Manipulation Is Sensitive to the Frame of Reference in Which It Is Learned
Abstract
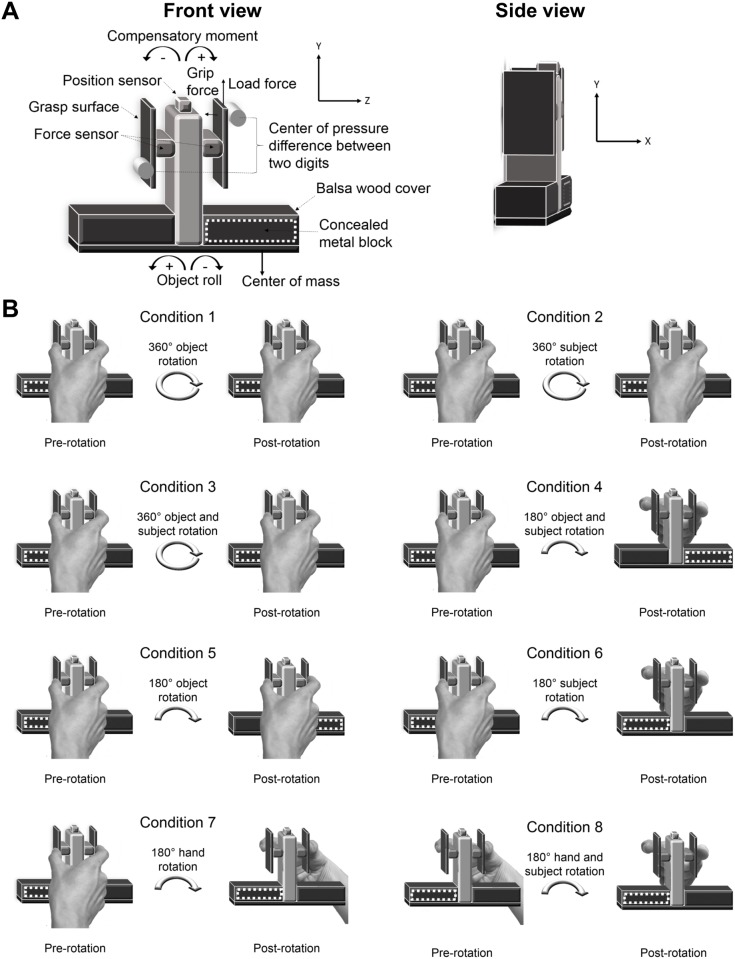
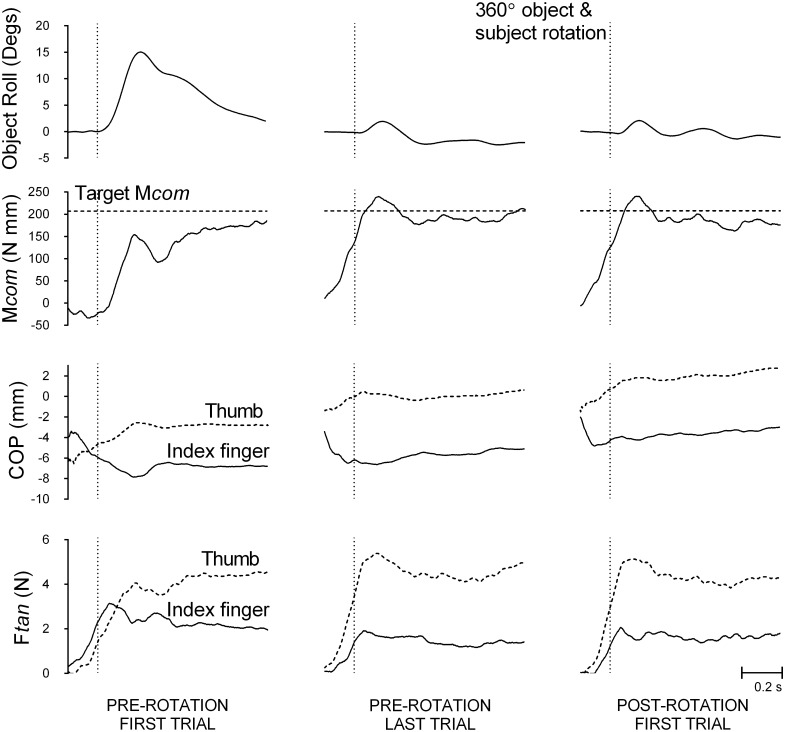
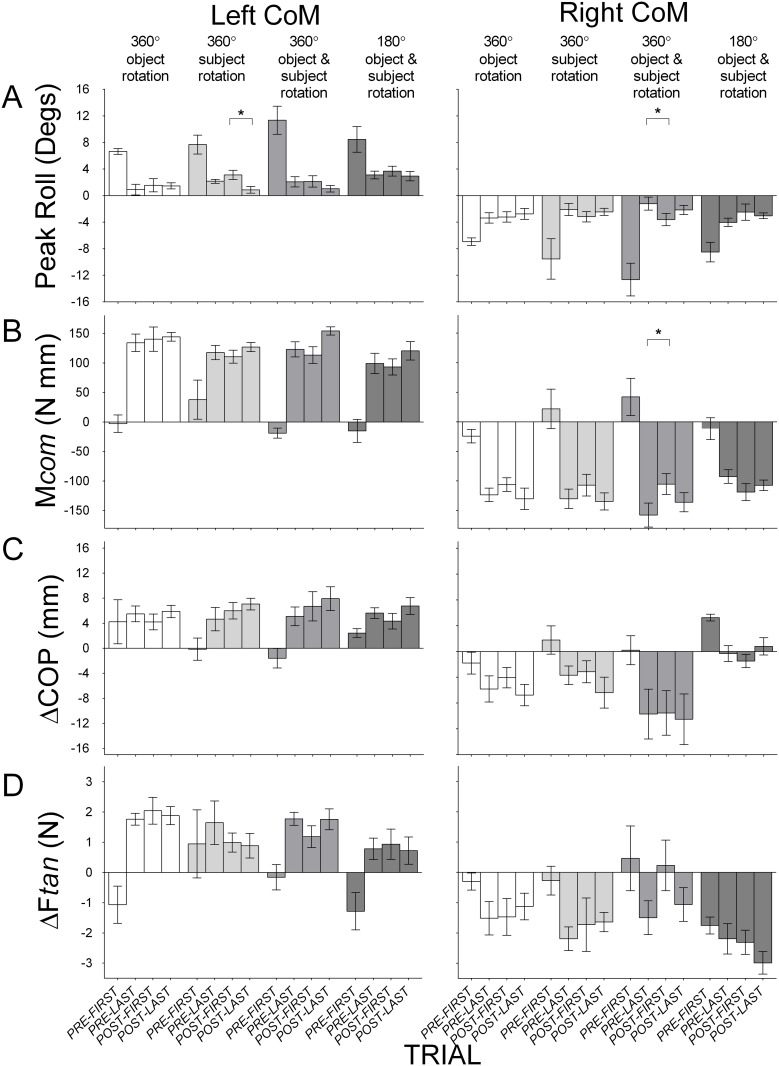
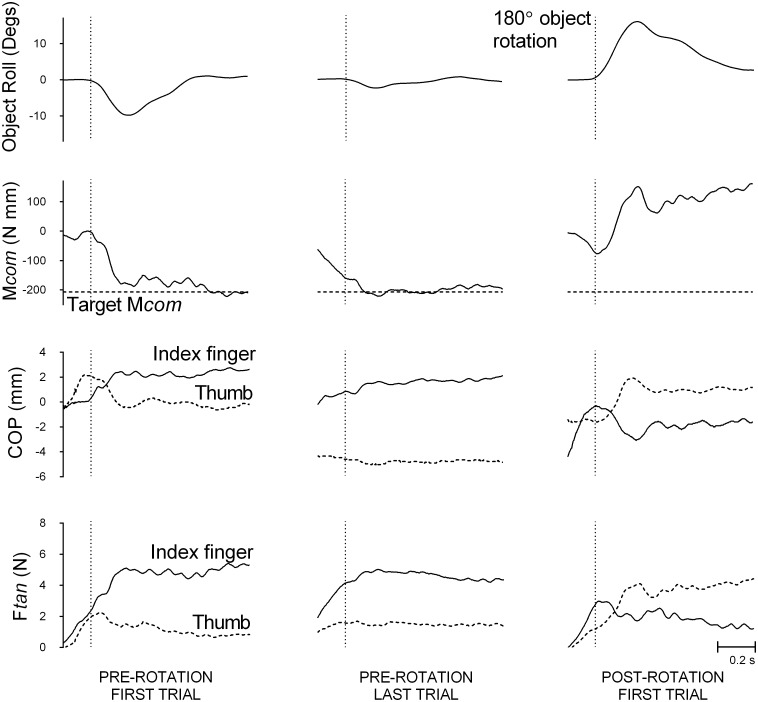
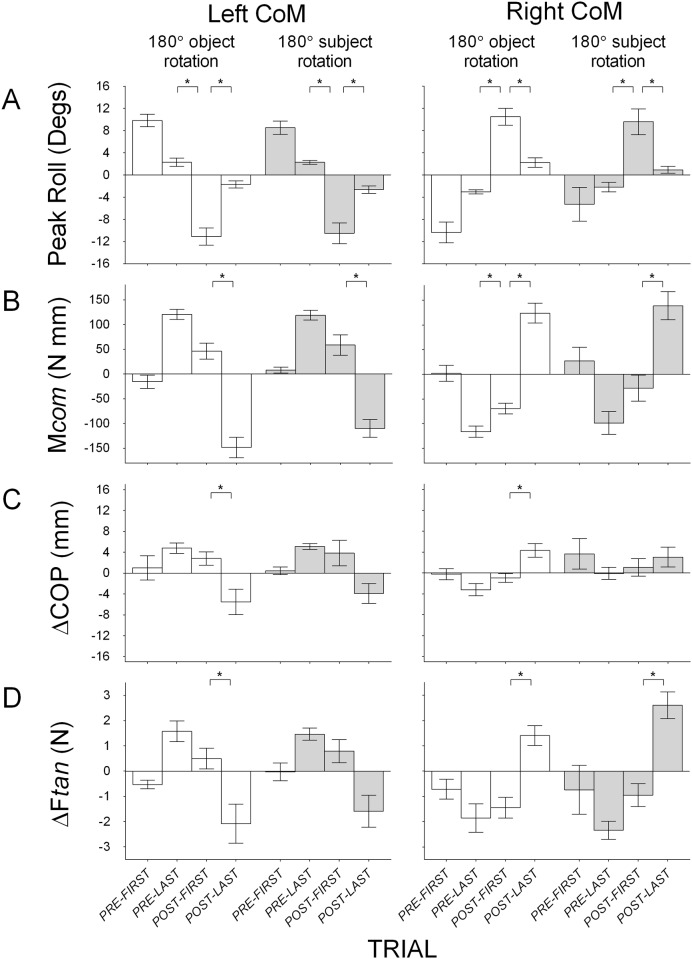
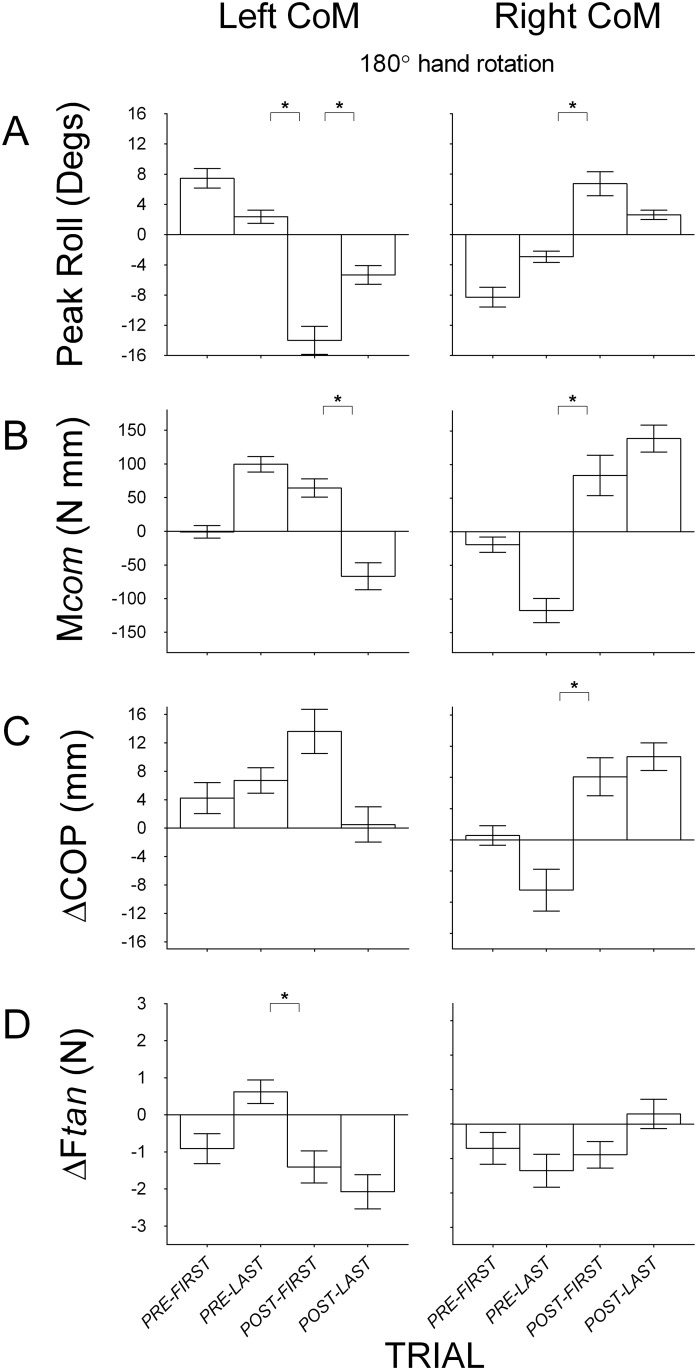
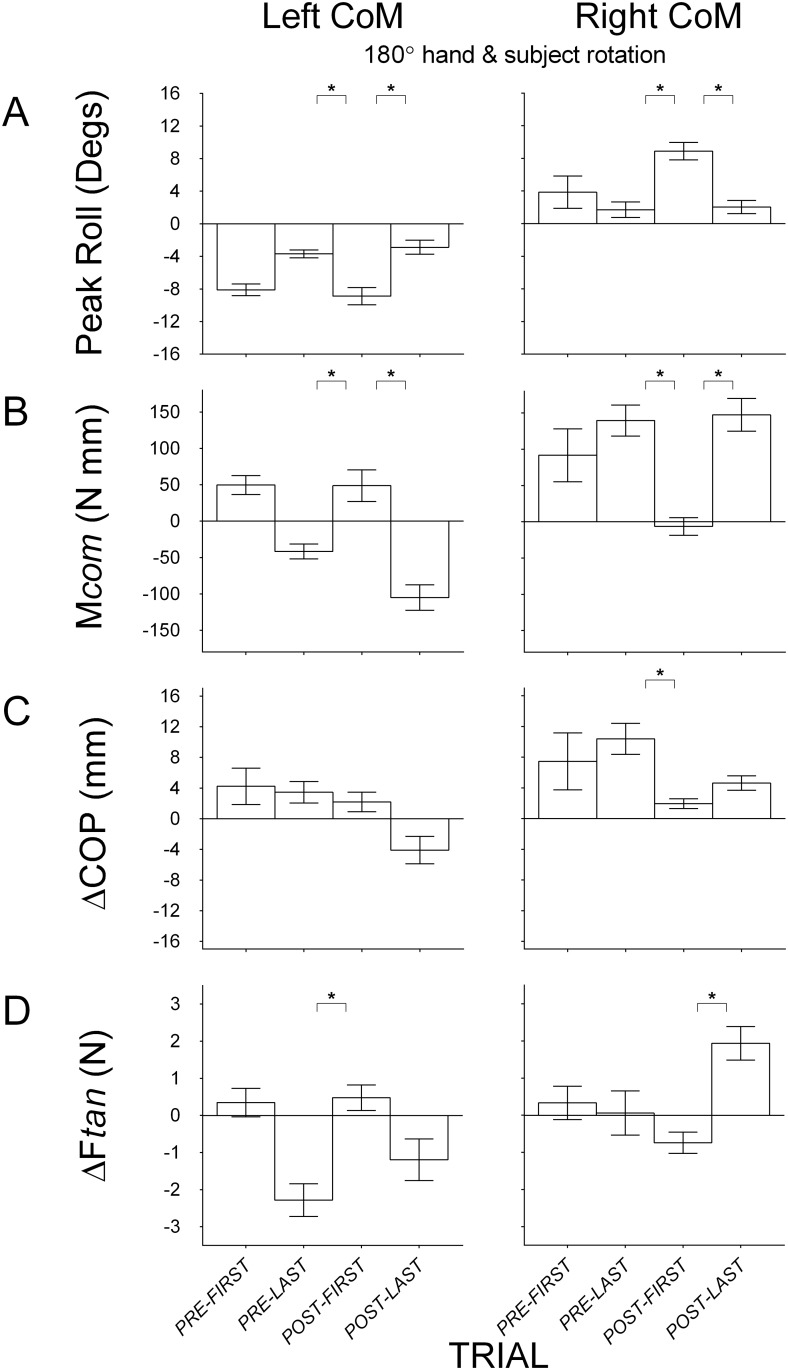
Studies have shown that internal representations of manipulations of objects with asymmetric mass distributions that are generated within a specific orientation are not generalizable to novel orientations, i.e., subjects fail to prevent object roll on their first grasp-lift attempt of the object following 180° object rotation. This suggests that representations of these manipulations are specific to the reference frame in which they are formed. However, it is unknown whether that reference frame is specific to the hand, the body, or both, because rotating the object 180° modifies the relation between object and body as well as object and hand. An alternative, untested explanation for the above failure to generalize learned manipulations is that any rotation will disrupt grasp performance, regardless if the reference frame in which the manipulation was learned is maintained or modified. We examined the effect of rotations that (1) maintain and (2) modify relations between object and body, and object and hand, on the generalizability of learned two-digit manipulation of an object with an asymmetric mass distribution. Following rotations that maintained the relation between object and body and object and hand (e.g., rotating the object and subject 180°), subjects continued to use appropriate digit placement and load force distributions, thus generating sufficient compensatory moments to minimize object roll. In contrast, following rotations that modified the relation between (1) object and hand (e.g. rotating the hand around to the opposite object side), (2) object and body (e.g. rotating subject and hand 180°), or (3) both (e.g. rotating the subject 180°), subjects used the same, yet inappropriate digit placement and load force distribution, as those used prior to the rotation. Consequently, the compensatory moments were insufficient to prevent large object rolls. These findings suggest that representations of learned manipulation of objects with asymmetric mass distributions are specific to the body- and hand-reference frames in which they were learned.
Conflict of interest statement
Figures
References
-
- Gordon AM, Westling G, Cole KJ, Johansson RS (1993) Memory representations underlying motor commands used during manipulation of common and novel objects. Journal of Neurophysiology 69: 1789–1797. - PubMed
-
- Johansson R, Westling G (1988) Coordinated isometric muscle commands adequately and erroneously programmed for the weight during lifting task with precision grip. Experimental Brain Research 71: 59–71. - PubMed
-
- Gordon AM, Forssberg H, Johansson RS, Westling G (1991) The integration of haptically acquired size information in the programming of precision grip. Experimental Brain Research 83: 483–488. - PubMed
-
- Gordon AM, Forssberg H, Johansson RS, Westling G (1991) Visual size cues in the programming of manipulative forces during precision grip. Experimental Brain Research 83: 477–482. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
