

Step by step: reconstruction of terrestrial animal movement paths by dead-reckoning
- PMID: 26380711
- PMCID: PMC4572461
- DOI: 10.1186/s40462-015-0055-4
Step by step: reconstruction of terrestrial animal movement paths by dead-reckoning
Abstract
Background: Research on wild animal ecology is increasingly employing GPS telemetry in order to determine animal movement. However, GPS systems record position intermittently, providing no information on latent position or track tortuosity. High frequency GPS have high power requirements, which necessitates large batteries (often effectively precluding their use on small animals) or reduced deployment duration. Dead-reckoning is an alternative approach which has the potential to 'fill in the gaps' between less resolute forms of telemetry without incurring the power costs. However, although this method has been used in aquatic environments, no explicit demonstration of terrestrial dead-reckoning has been presented.
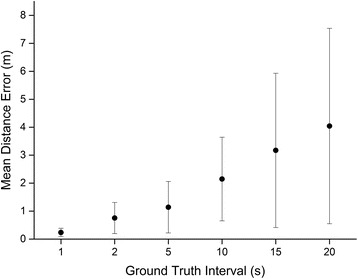
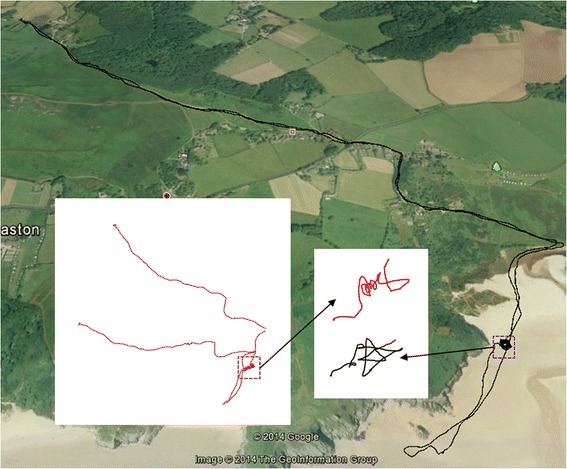
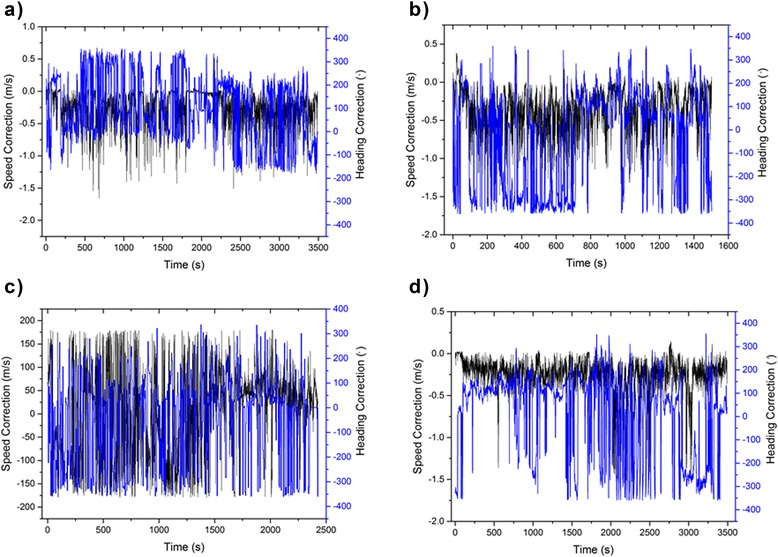
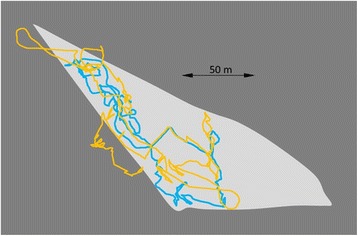
Results: We perform a simple validation experiment to assess the rate of error accumulation in terrestrial dead-reckoning. In addition, examples of successful implementation of dead-reckoning are given using data from the domestic dog Canus lupus, horse Equus ferus, cow Bos taurus and wild badger Meles meles.
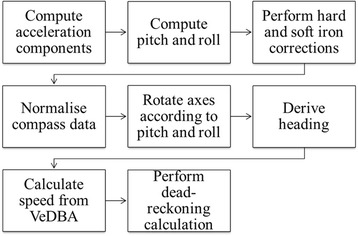
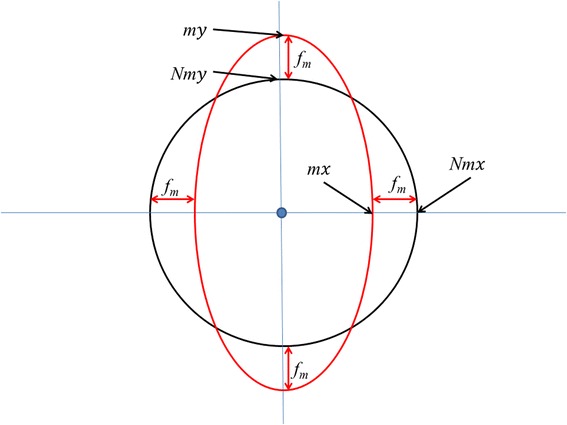
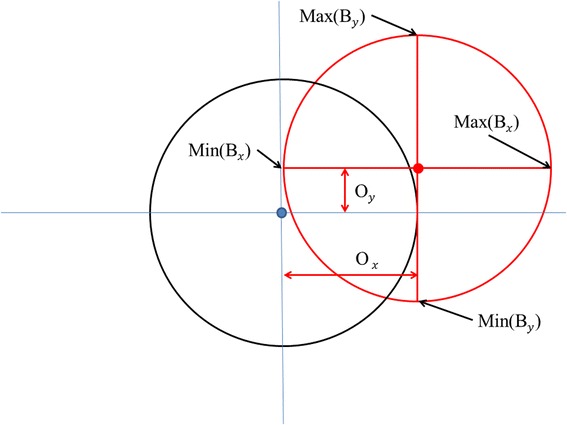
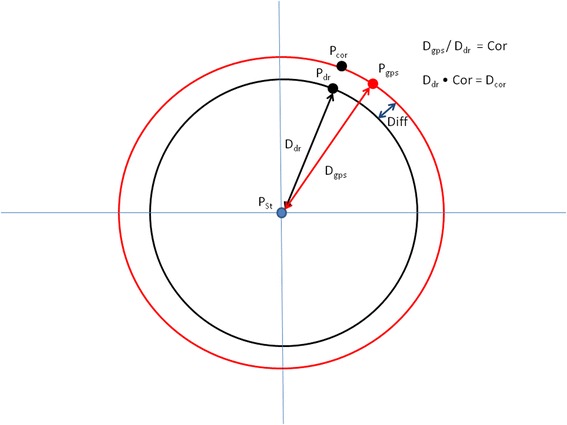
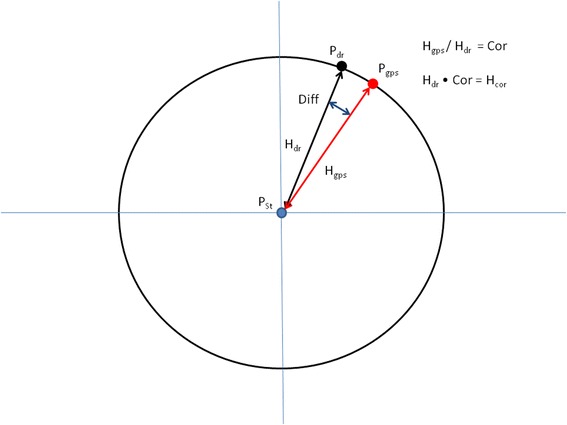
Conclusions: This study documents how terrestrial dead-reckoning can be undertaken, describing derivation of heading from tri-axial accelerometer and tri-axial magnetometer data, correction for hard and soft iron distortions on the magnetometer output, and presenting a novel correction procedure to marry dead-reckoned paths to ground-truthed positions. This study is the first explicit demonstration of terrestrial dead-reckoning, which provides a workable method of deriving the paths of animals on a step-by-step scale. The wider implications of this method for the understanding of animal movement ecology are discussed.
Keywords: GPS; Step length; animal movement; dead reckoning; terrestrial.
Figures

References
-
- Stephens DW, Brown JS, Ydenberg RC. Foraging: behaviour and ecology. Chicago: Chicago University Press; 2007.
-
- Stephens DW, Krebs JR. Foraging theory. Princeton NJ: Princeton University Press; 1986.
-
- Swingland IR, Greenwood PJ. The ecology of animal movement. Oxford: Clarendon; 1983.
-
- Dale VH, Brown S, Haeuber RA, Hobbs NT, Huntly N, Naiman RJ, et al. Ecological principles and guidelines for managing the use of land. Ecol Appl. 2000;10(3):639–70.
LinkOut - more resources
Full Text Sources
Other Literature Sources
