

CustusX: an open-source research platform for image-guided therapy
- PMID: 26410841
- PMCID: PMC4819973
- DOI: 10.1007/s11548-015-1292-0
CustusX: an open-source research platform for image-guided therapy
Abstract
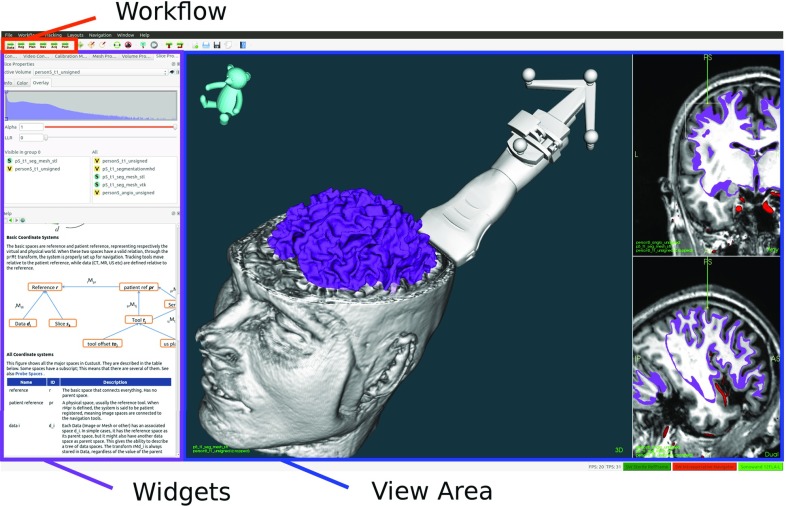
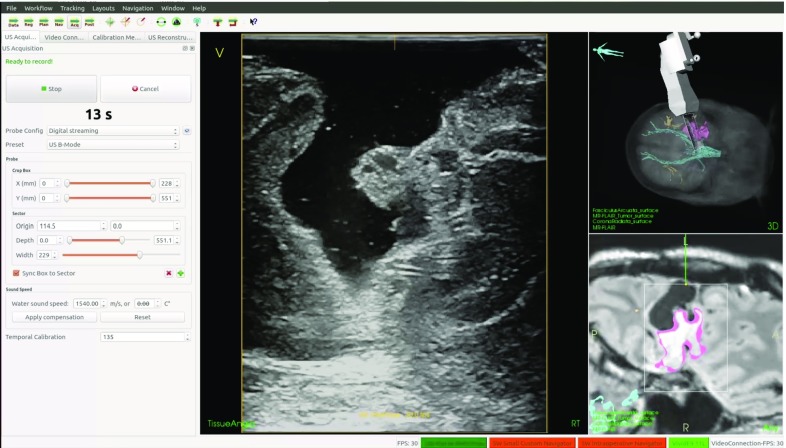
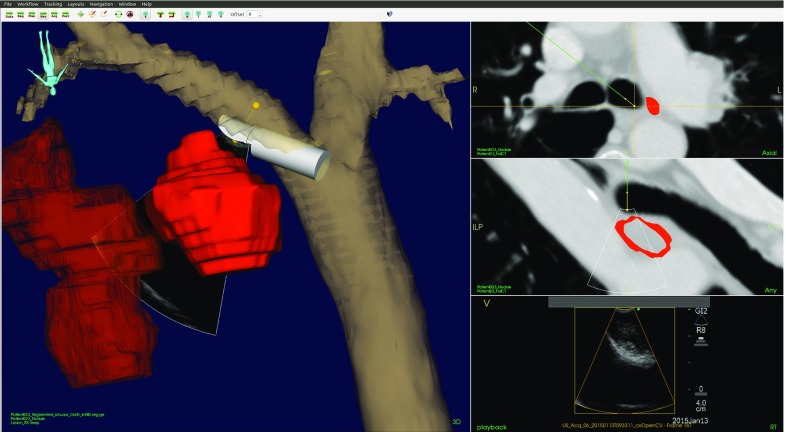
Purpose: CustusX is an image-guided therapy (IGT) research platform dedicated to intraoperative navigation and ultrasound imaging. In this paper, we present CustusX as a robust, accurate, and extensible platform with full access to data and algorithms and show examples of application in technological and clinical IGT research.
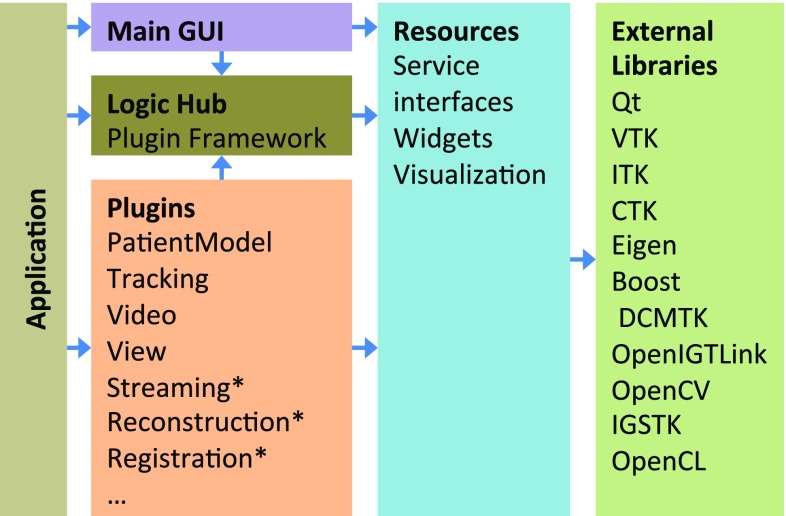
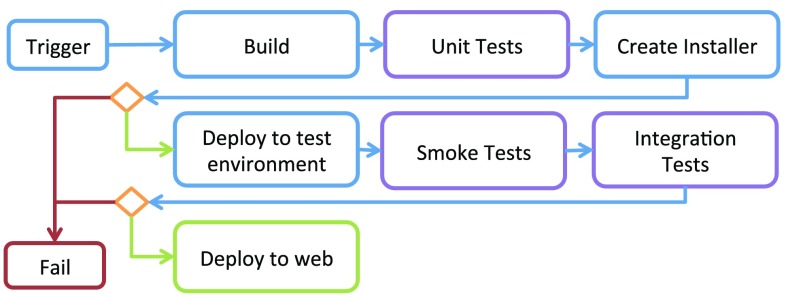
Methods: CustusX has been developed continuously for more than 15 years based on requirements from clinical and technological researchers within the framework of a well-defined software quality process. The platform was designed as a layered architecture with plugins based on the CTK/OSGi framework, a superbuild that manages dependencies and features supporting the IGT workflow. We describe the use of the system in several different clinical settings and characterize major aspects of the system such as accuracy, frame rate, and latency.
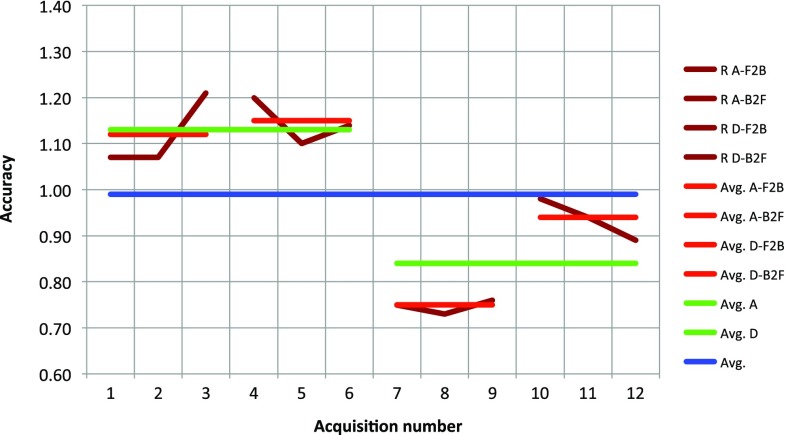
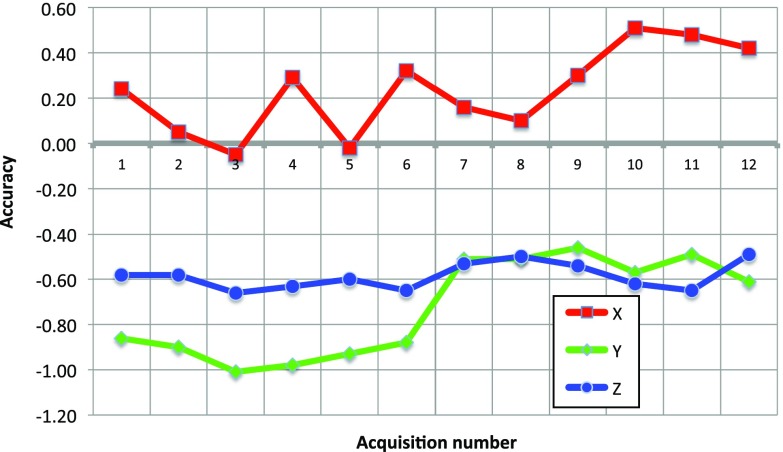
Results: The validation experiments show a navigation system accuracy of [Formula: see text]1.1 mm, a frame rate of 20 fps, and latency of 285 ms for a typical setup. The current platform is extensible, user-friendly and has a streamlined architecture and quality process. CustusX has successfully been used for IGT research in neurosurgery, laparoscopic surgery, vascular surgery, and bronchoscopy.
Conclusions: CustusX is now a mature research platform for intraoperative navigation and ultrasound imaging and is ready for use by the IGT research community. CustusX is open-source and freely available at http://www.custusx.org.
Keywords: Computer-assisted interventions; Image-guided therapy; Intraoperative ultrasound; Open source; Platform.
Figures





References
-
- Fedorov A, Beichel R, Kalpathy-Cramer J, Finet J, Fillion-Robin JC, Pujol S, Bauer C, Jennings D, Fennessy F, Sonka M, Buatti J, Aylward S, Miller JV, Pieper S, Kikinis R. 3D slicer as an image computing platform for the quantitative imaging network. Magn Reson Imaging. 2012;30(9):1323–1341. doi: 10.1016/j.mri.2012.05.001. - DOI - PMC - PubMed
-
- Nolden M, Zelzer S, Seitel A, Wald D, Muller M, Franz AM, Maleike D, Fangerau M, Baumhauer M, Maier-Hein L, Maier-Hein KH, Meinzer HP, Wolf I. The medical imaging interaction toolkit: challenges and advances: 10 years of open-source development. Int J Comput Assist Radiol Surg. 2013;8(4):607–620. doi: 10.1007/s11548-013-0840-8. - DOI - PubMed
-
- Mercier L, Del Maestro RF, Petrecca K, Kochanowska A, Drouin S, Yan CX, Janke AL, Chen SJ, Collins DL. New prototype neuronavigation system based on preoperative imaging and intraoperative freehand ultrasound: system description and validation. Int J Comput Assist Radiol Surg. 2011;6(4):507–522. doi: 10.1007/s11548-010-0535-3. - DOI - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
