

doi: 10.1002/adma.201504155.
Epub 2015 Oct 15.
An Epidermal Stimulation and Sensing Platform for Sensorimotor Prosthetic Control, Management of Lower Back Exertion, and Electrical Muscle Activation
Affiliations
- PMID: 26469201
- PMCID: PMC4833675
- DOI: 10.1002/adma.201504155
Item in Clipboard
An Epidermal Stimulation and Sensing Platform for Sensorimotor Prosthetic Control, Management of Lower Back Exertion, and Electrical Muscle Activation
Adv Mater.
2016 Jun.
Abstract
The design of an ultrathin, conformal electronic device that integrates electrotactile stimulation with electromyography, temperature, and strain sensing in a single, simple platform is reported. Experiments demonstrate simultaneous use of multiple modes of operation of this type of device in the sensorimotor control of robotic systems, in the monitoring of lower back exertion and in muscle stimulation.
Keywords: electromyography, sensorimotor control; electrostimulation; epidermal sensors; ultrathin electronics.
© 2015 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim.
Figures
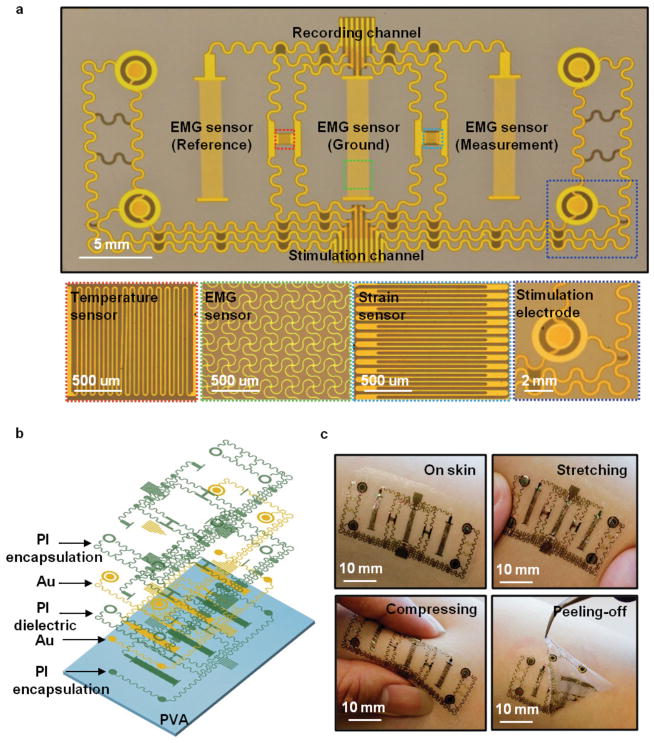
Images and design features of a simple, multifunctional device with skin-like physical characteristics and capabilities in both sensing and stimulation. a) Planar view optical image of a representative device. The insets highlight various active regions. b) Exploded-view schematic illustration of the multilayer construction, composed only of patterns of metals and dielectrics. c) Images of a device mounted on the forearm, with examples under stretching, compressing, and peeling-off.
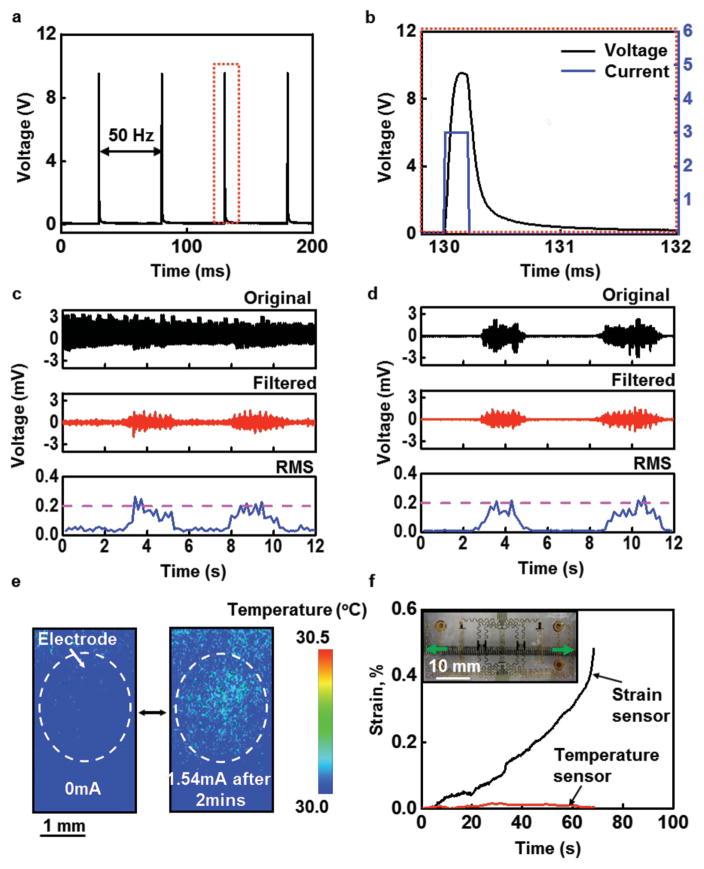
Summary of functional attributes in sensing and stimulation. a) Voltage recorded between the two coaxial electrodes associated with an electrotactile stimulator during 20 Hz operation at 3 mA. b) Magnified view of the recorded voltage over one period of stimulation (black), with applied stimulation current signal (blue). c) EMG signals collected from the forearm (original, filtered, and root mean square (RMS)) during simultaneous stimulation through top two electrodes (Figure 1a). The raw recorded data include signals that arise from the stimulation, which mask the EMG response. d) Optimized digital filters can remove the effects of stimulation, to yield EMG data that correspond well to recordings performed without stimulation. e) Infrared images of a stimulation electrode on the skin before (left) and after (right) 2 min of 20 Hz operation at 1.54 mA. f) Mechanical analysis of the effect of stretch along the x-direction, as measured by the epidermal strain gauge, on temperature measurements performed simultaneously. The inset shows the epidermal device being stretched by a mechanical stage.
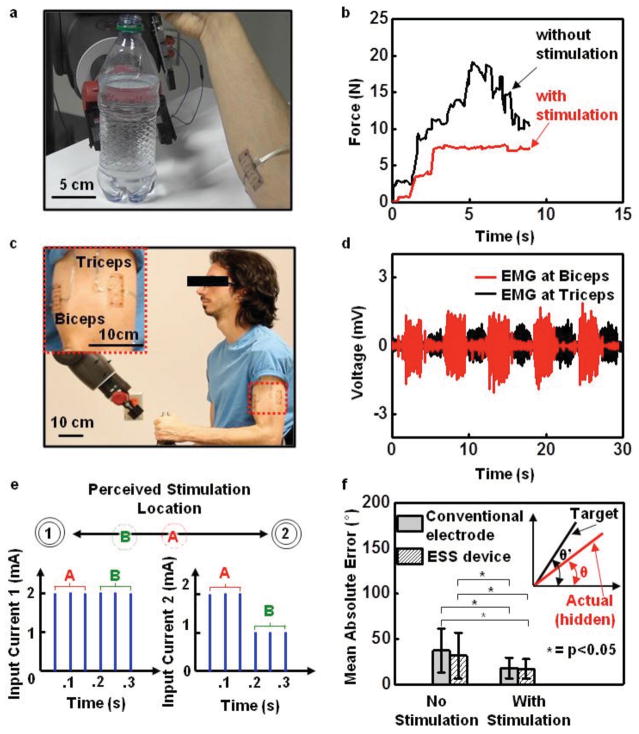
Sensorimotor control of a robot arm. a) Image of a device on the forearm while controlling a robot arm to grip a bottle filled with water. b) Gripping force with and without stimulation feedback. When feedback is present, the subject can grip the bottle in a controlled manner, to prevent collapse. c) Image of devices on the bicep and tricep (inset) during control of the angle of the elbow of a robot arm. d) EMG signals from two devices when alternating between flexion and extension of the robot arm’s elbow angle. e) Stimulation waveforms used to produce the tactile funneling illusion. When two stimulation electrodes are simultaneously active, sensation is perceived between the two electrodes. By modulating the stimulation current amplitudes, the location of the perceived sensation can be adjusted to any point between the two electrodes, as shown for current amplitudes A and B in the second electrode. The perceived sensation will be felt closer to the electrode with the higher current amplitude. f) Accuracy associated with the virtual arm targeting task with and without stimulation using both conventional electrodes and the epidermal device (p < 0.05, one-way ANOVA, Tukey post hoc). The hidden virtual arm (inset, red line) was controlled via EMG to match a static visible target joint angle (inset, black line). When stimulation was present, the joint angle of the hidden virtual arm was mapped linearly to a location between two stimulation electrodes via the tactile funneling location.
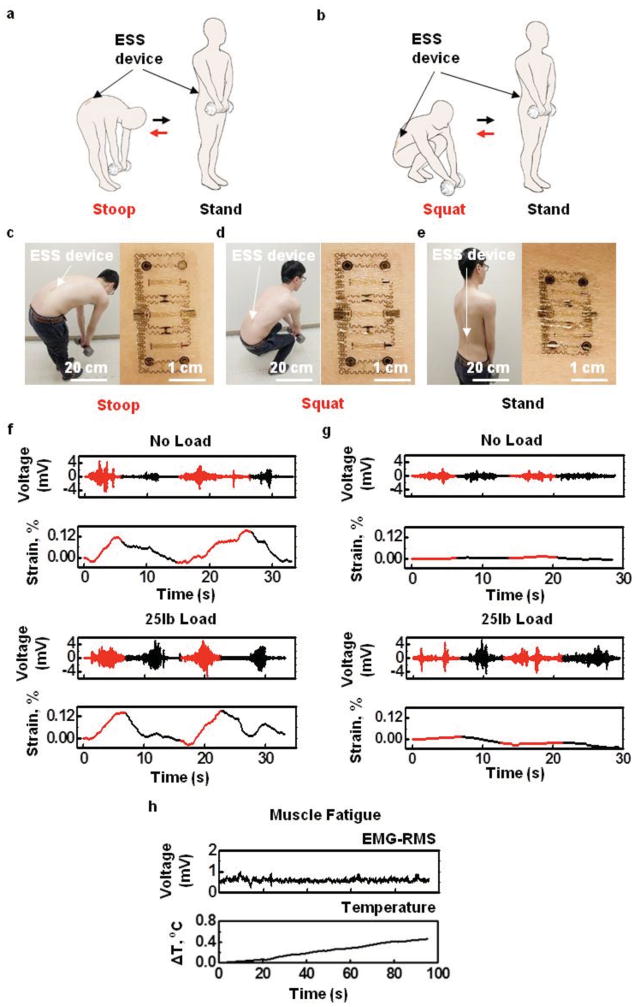
Assessment of exertion and posture of the lower back during lifting. Cartoon illustration of motions associated with a) stoop lifting and b) squat lifting. Image of a device mounted on the lower back muscle groups and the deformation of device under c) stoop position with 25 lb weight, d) squat position with 25 lb weight, and e) stand position with 25 lb weight. f) Comparison of EMG and strain during stooping (red) and standing (black) with and without a 25 lb load (top and bottom, respectively). g) Comparison of EMG and strain during squatting (red) and standing (black) with and without a 25 lb load (top and bottom, respectively). h) Simultaneously recorded lower back EMG-RMS and temperature signals during muscle fatigue.
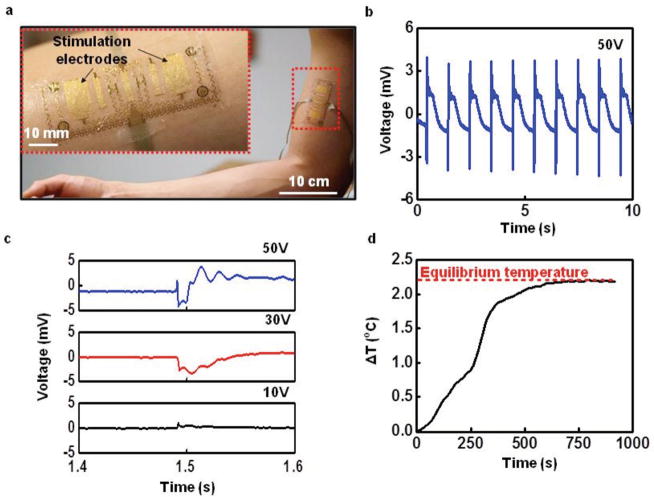
Device with large-area electrodes for electrical muscle stimulation. a) Image of a device mounted on the biceps (magnified view, inset). b) Example of evoked M-waves from induced contraction of the biceps during 1 Hz stimulation at a voltage of 50 V. c) Magnified view of a resulting M-wave at 50, 30, and 10 V stimulations. d) Measured temperature from epidermal device during prolonged electrical muscle stimulation for 15 min.
References
-
- Xu S, Zhang Y, Jia L, Mathewson KE, Jang KI, Kim J, Fu H, Huang X, Chava P, Wang R, Bhole S, Wang L, Na YJ, Guan Y, Flavin M, Han Z, Huang Y, Rogers JA. Science. 2014;344:70. - PubMed
-
- Budinger TF. Annu Rev Biomed Eng. 2003;5:383. - PubMed
-
- Tee BCK, Wang C, Allen R, Bao Z. Nat Nanotechnol. 2012;7:825. - PubMed
-
- Jeong JW, Yeo WH, Akhtar A, Norton JJS, Kwack YJ, Li S, Jung SY, Su Y, Lee W, Xia J, Cheng H, Huang Y, Choi WS, Bretl T, Rogers JA. Adv Mater. 2013;25:6839. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
