

Shoulder pain and jerk during recovery phase of manual wheelchair propulsion
- PMID: 26472307
- PMCID: PMC4655152
- DOI: 10.1016/j.jbiomech.2015.09.018
Shoulder pain and jerk during recovery phase of manual wheelchair propulsion
Abstract
Repetitive loading of the upper limb due to wheelchair propulsion plays a leading role in the development of shoulder pain in manual wheelchair users (mWCUs). There has been minimal inquiry on understanding wheelchair propulsion kinematics from a human movement ergonomics perspective. This investigation employs an ergonomic metric, jerk, to characterize the recovery phase kinematics of two recommended manual wheelchair propulsion patterns: semi-circular and the double loop. Further it examines if jerk is related to shoulder pain in mWCUs. Data from 22 experienced adult mWCUs was analyzed for this study (semi-circular: n=12 (pain/without-pain:6/6); double-loop: n=10 (pain/without-pain:4/6)). Participants propelled their own wheelchair fitted with SMARTWheels on a roller dynamometer at 1.1 m/s for 3 min. Kinematic and kinetic data of the upper limbs were recorded. Three dimensional absolute jerk experienced at the shoulder, elbow and wrist joint during the recovery phase of wheelchair propulsion were computed. Two-way ANOVAs were conducted with the recovery pattern type and shoulder pain as between group factors.
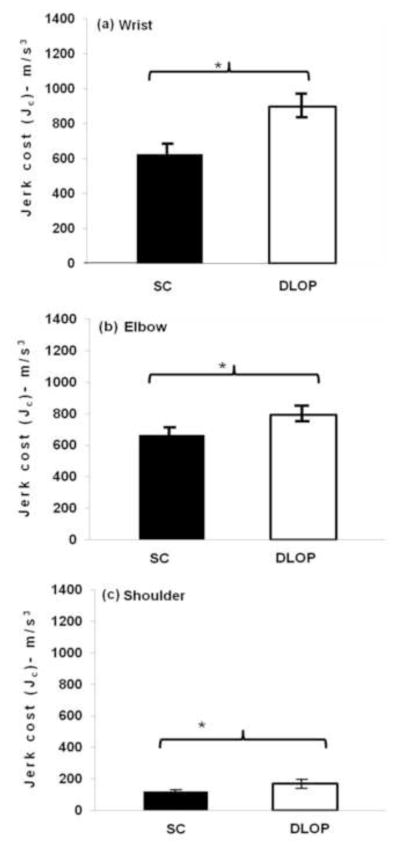
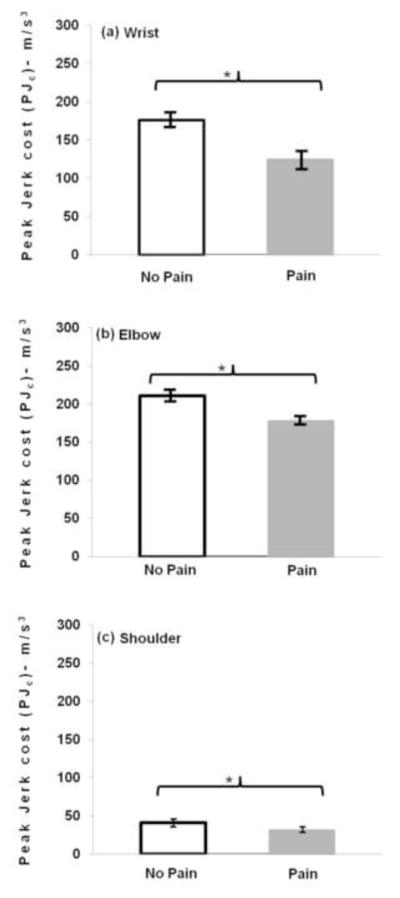
Findings: (1) Individuals using a semi-circular pattern experienced lower jerk at their arm joints than those using a double loop pattern (P<0.05, η(2)=0.32)wrist;(P=0.05, η(2)=0.19)elbow;(P<0.05, η(2)=0.34)shoulder and (2) individuals with shoulder pain had lower peak jerk magnitude during the recovery phase (P≤0.05, η(2)=0.36)wrist;(P≤0.05, η(2)=0.30)elbow;(P≤0.05, η(2)=0.31)shoulder.
Conclusions: Jerk during wheelchair propulsion was able to distinguish between pattern types (semi-circular and double loop) and the presence of shoulder pain. Jerk provides novel insights into wheelchair propulsion kinematics and in the future it may be beneficial to incorporate jerk based metric into rehabilitation practice.
Keywords: Ergonomics of movement; Jerk cost; Motor control; Repetitive strain injury; Shoulder rehabilitation; Wheelchair propulsion.
Copyright © 2015 Elsevier Ltd. All rights reserved.
Conflict of interest statement
7.
The authors have no conflict of interest to disclose.
Figures
Similar articles
-
Shoulder pain and cycle to cycle kinematic spatial variability during recovery phase in manual wheelchair users: a pilot investigation.PLoS One. 2014 Mar 10;9(3):e89794. doi: 10.1371/journal.pone.0089794. eCollection 2014. PLoS One. 2014. PMID: 24614232 Free PMC article.
-
Variability of peak shoulder force during wheelchair propulsion in manual wheelchair users with and without shoulder pain.Clin Biomech (Bristol). 2013 Nov-Dec;28(9-10):967-72. doi: 10.1016/j.clinbiomech.2013.10.004. Epub 2013 Oct 12. Clin Biomech (Bristol). 2013. PMID: 24210512 Free PMC article. Clinical Trial.
-
Shoulder pain and time dependent structure in wheelchair propulsion variability.Med Eng Phys. 2016 Jul;38(7):648-655. doi: 10.1016/j.medengphy.2016.04.005. Epub 2016 Apr 25. Med Eng Phys. 2016. PMID: 27134151 Free PMC article.
-
Upper-limb joint kinetics expression during wheelchair propulsion.J Rehabil Res Dev. 2009;46(7):939-44. doi: 10.1682/jrrd.2008.12.0165. J Rehabil Res Dev. 2009. PMID: 20104416 Free PMC article. Review.
-
Exploring the biomechanical link between wheelchair propulsion, shoulder injury and shoulder pain: A scoping review.J Biomech. 2025 May;185:112678. doi: 10.1016/j.jbiomech.2025.112678. Epub 2025 Apr 10. J Biomech. 2025. PMID: 40250244
Cited by
-
Predictors of shoulder pain in manual wheelchair users.Clin Biomech (Bristol). 2019 May;65:1-12. doi: 10.1016/j.clinbiomech.2019.03.003. Epub 2019 Mar 6. Clin Biomech (Bristol). 2019. PMID: 30927682 Free PMC article.
-
Shoulder pain and ultrasound findings: A comparison study of wheelchair athletes, nonathletic wheelchair users, and nonwheelchair users.PM R. 2022 May;14(5):551-560. doi: 10.1002/pmrj.12648. Epub 2021 Jul 22. PM R. 2022. PMID: 34028204 Free PMC article.
-
Kinematic analysis of motor learning in upper limb body-powered bypass prosthesis training.PLoS One. 2020 Jan 24;15(1):e0226563. doi: 10.1371/journal.pone.0226563. eCollection 2020. PLoS One. 2020. PMID: 31978051 Free PMC article.
-
The influence of shoulder pain and fear of falling on level and non-level transfer technique.J Spinal Cord Med. 2022 May;45(3):364-372. doi: 10.1080/10790268.2021.1971922. Epub 2022 Jan 10. J Spinal Cord Med. 2022. PMID: 35007474 Free PMC article.
-
Forward dynamic optimization of handle path and muscle activity for handle based isokinetic wheelchair propulsion: A simulation study.Comput Methods Biomech Biomed Engin. 2019 Jan;22(1):55-63. doi: 10.1080/10255842.2018.1527321. Epub 2018 Nov 6. Comput Methods Biomech Biomed Engin. 2019. PMID: 30398368 Free PMC article.
References
-
- Bednarczyk JH, Sanderson DJ. Kinematics of wheelchair propulsion in adults and children with spinal cord injury. Arch Phys Med Rehabil. 1994;75(12):1327–1334. - PubMed
-
- Boninger ML, Cooper RA, Robertson RN, Rudy TE. Wrist biomechanics during two speeds of wheelchair propulsion: An analysis using a local coordinate system. Archives of Physical Medicine and Rehabilitation. 1997;78(4):364–372. - PubMed
-
- Boninger ML, Souza AL, Cooper RA, Fitzgerald SG, Koontz AM, Fay BT. Propulsion patterns and pushrim biomechanics in manual wheelchair propulsion. Archives of Physical Medicine and Rehabilitation. 2002;83(5):718–723. - PubMed
-
- Boninger ML, Cooper RA, Fitzgerald SG, Lin J, Cooper R, Dicianno B, Liu B. Investigating neck pain in wheelchair users. Am J Phys Med Rehabil. 2003;82(3):197–202. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
