

Suction-based propulsion as a basis for efficient animal swimming
- PMID: 26529342
- PMCID: PMC4667611
- DOI: 10.1038/ncomms9790
Suction-based propulsion as a basis for efficient animal swimming
Abstract
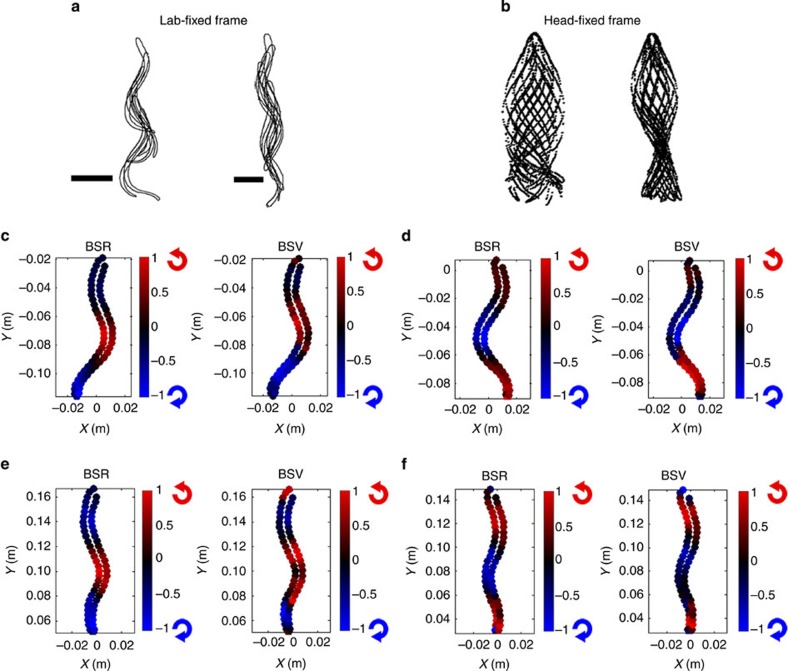
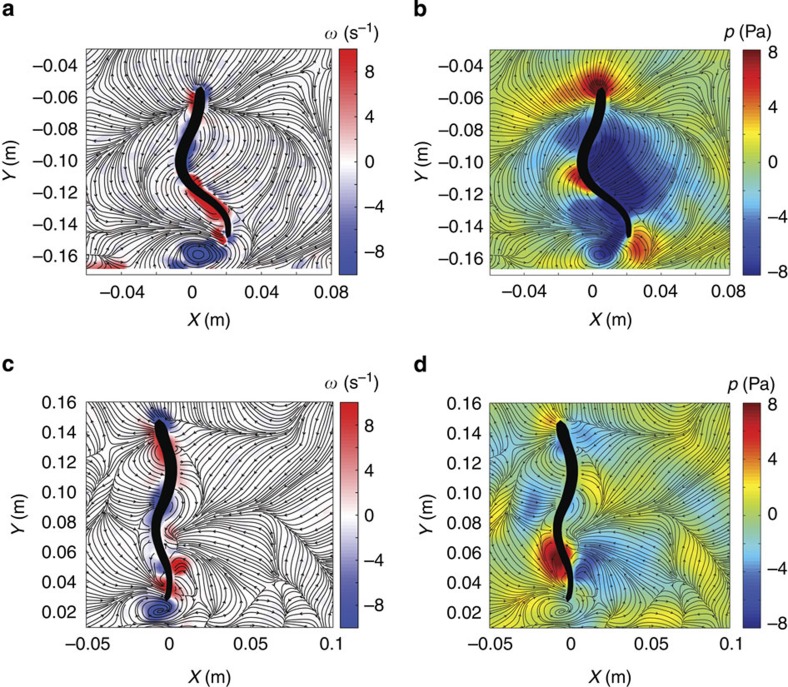
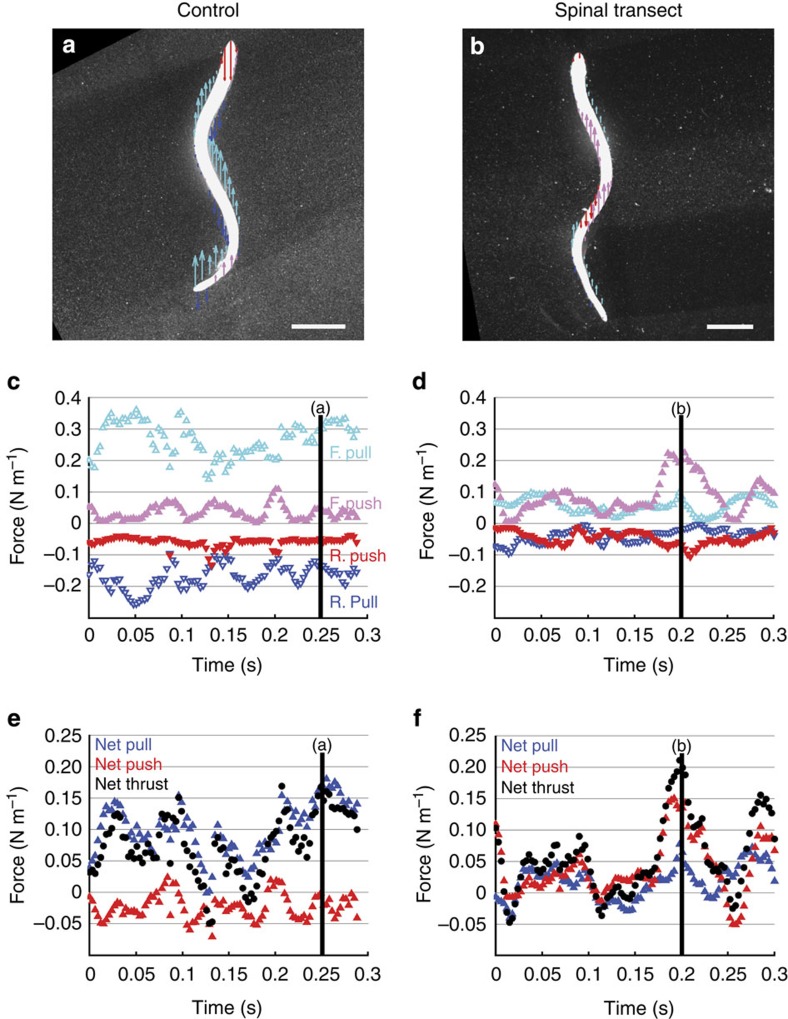
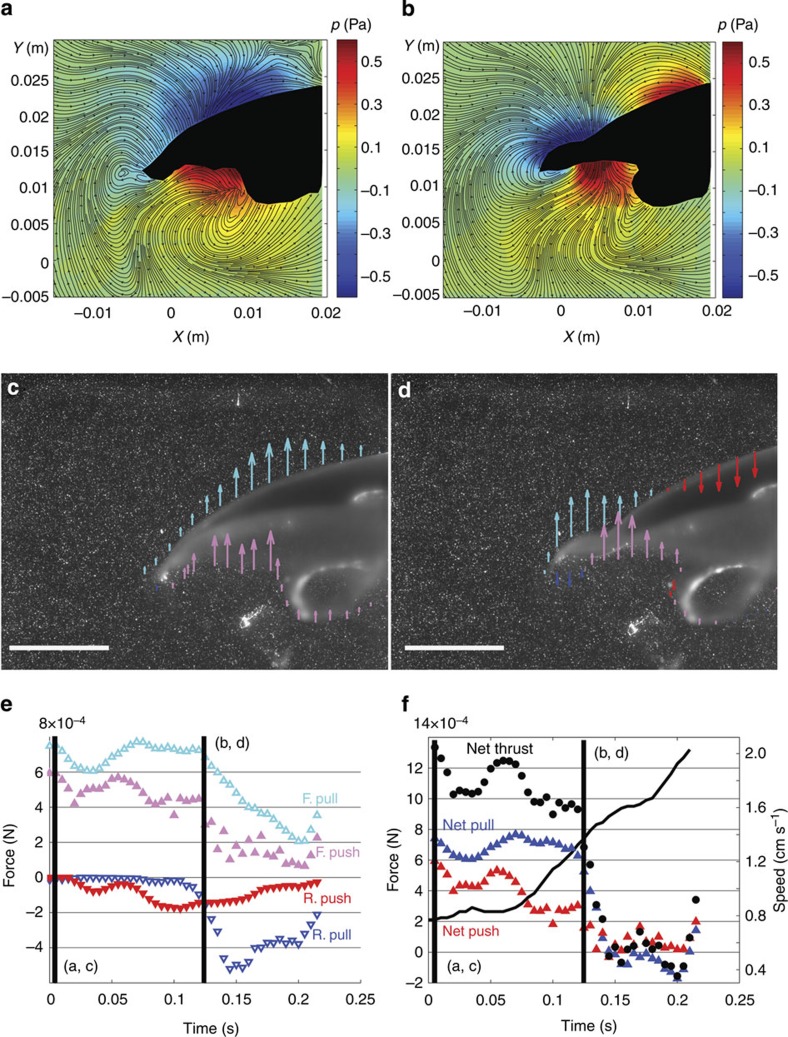
A central and long-standing tenet in the conceptualization of animal swimming is the idea that propulsive thrust is generated by pushing the surrounding water rearward. Inherent in this perspective is the assumption that locomotion involves the generation of locally elevated pressures in the fluid to achieve the expected downstream push of the surrounding water mass. Here we show that rather than pushing against the surrounding fluid, efficient swimming animals primarily pull themselves through the water via suction. This distinction is manifested in dominant low-pressure regions generated in the fluid surrounding the animal body, which are observed by using particle image velocimetry and a pressure calculation algorithm applied to freely swimming lampreys and jellyfish. These results suggest a rethinking of the evolutionary adaptations observed in swimming animals as well as the mechanistic basis for bio-inspired and biomimetic engineered vehicles.
Figures
References
-
- Breder C. M. The locomotion of fishes. Zoologica 4, 159–297 (1926).
-
- Sfakiotakis M., Lane D. & Davies B. Review of fish swimming modes for aquatic locomotion. J. Oceanic Eng. 24, 237–252 (1999).
-
- Vogel S. Comparative Biomechanics: Life's Physical World Princeton University Press (2013).
-
- Lighthill M. J. Large-amplitude elongated-body theory of fish locomotion. Proc. R. Soc. B 179, 125–138 (1971).
-
- Biewener A. A. Animal Locomotion Oxford University Press (2003).
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
