

iShadow: Design of a Wearable, Real-Time Mobile Gaze Tracker
- PMID: 26539565
- PMCID: PMC4629875
- DOI: 10.1145/2594368.2594388
iShadow: Design of a Wearable, Real-Time Mobile Gaze Tracker
Abstract
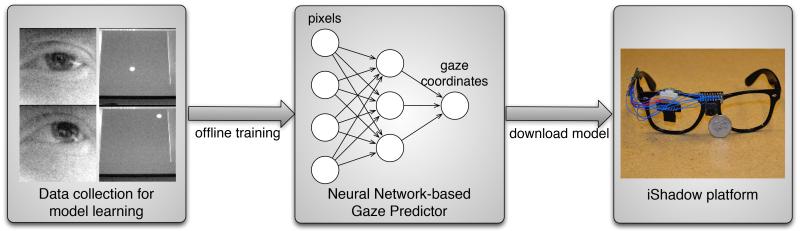
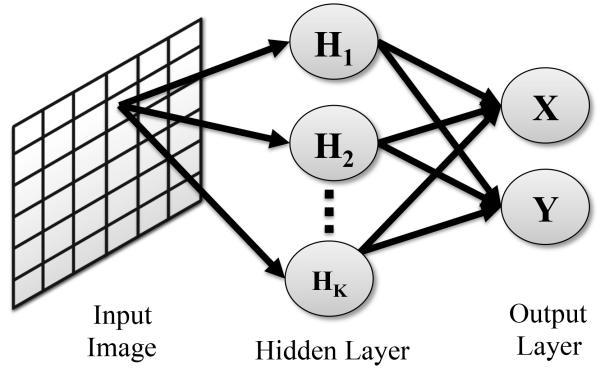
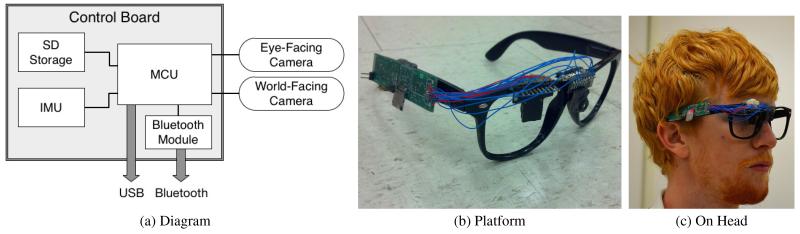
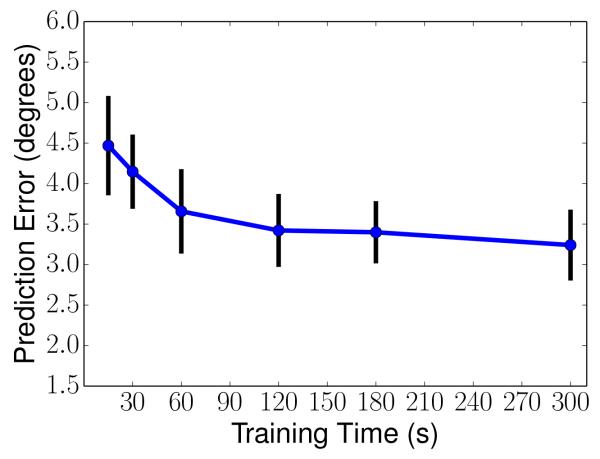
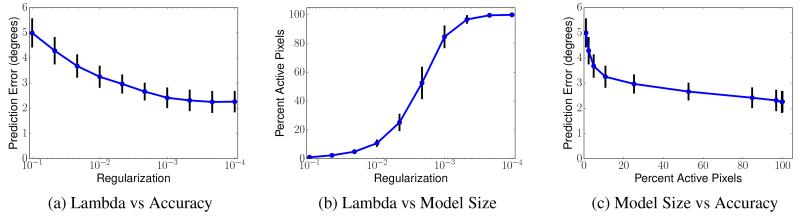
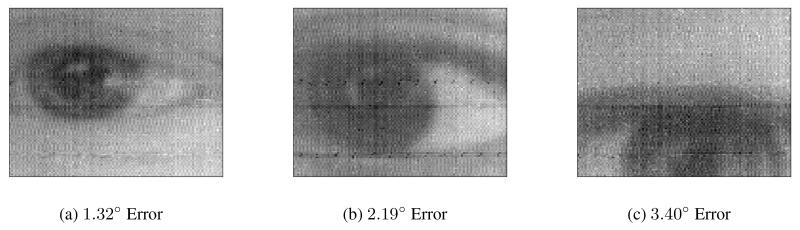
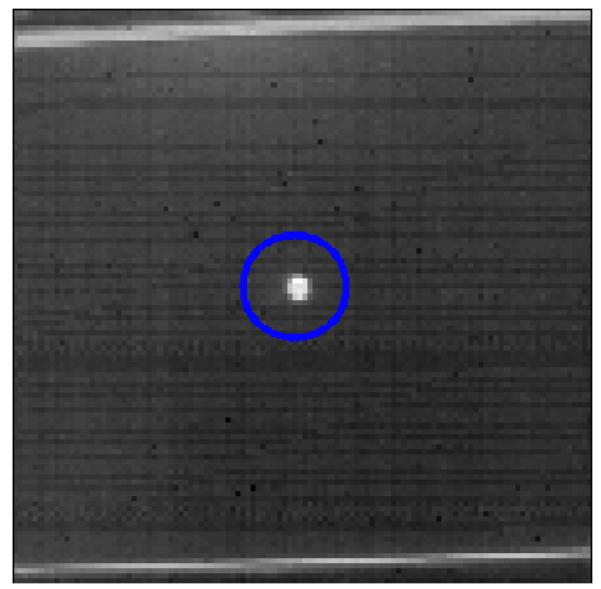
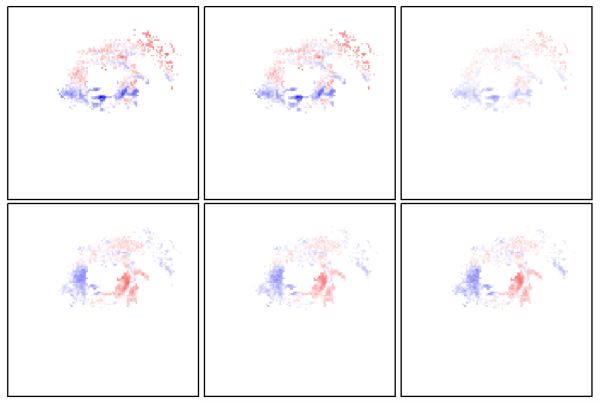
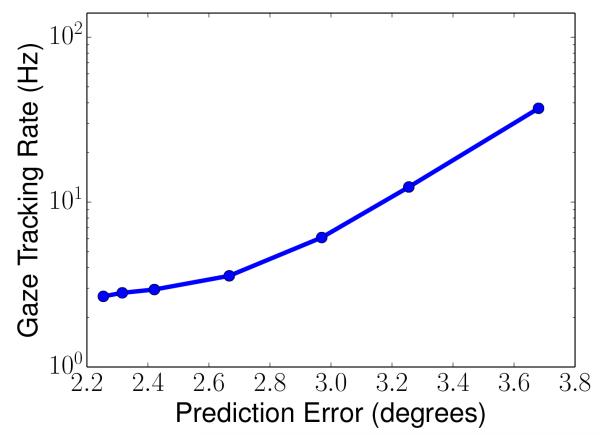
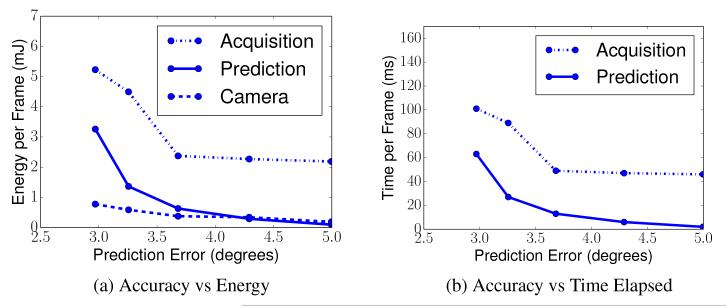
Continuous, real-time tracking of eye gaze is valuable in a variety of scenarios including hands-free interaction with the physical world, detection of unsafe behaviors, leveraging visual context for advertising, life logging, and others. While eye tracking is commonly used in clinical trials and user studies, it has not bridged the gap to everyday consumer use. The challenge is that a real-time eye tracker is a power-hungry and computation-intensive device which requires continuous sensing of the eye using an imager running at many tens of frames per second, and continuous processing of the image stream using sophisticated gaze estimation algorithms. Our key contribution is the design of an eye tracker that dramatically reduces the sensing and computation needs for eye tracking, thereby achieving orders of magnitude reductions in power consumption and form-factor. The key idea is that eye images are extremely redundant, therefore we can estimate gaze by using a small subset of carefully chosen pixels per frame. We instantiate this idea in a prototype hardware platform equipped with a low-power image sensor that provides random access to pixel values, a low-power ARM Cortex M3 microcontroller, and a bluetooth radio to communicate with a mobile phone. The sparse pixel-based gaze estimation algorithm is a multi-layer neural network learned using a state-of-the-art sparsity-inducing regularization function that minimizes the gaze prediction error while simultaneously minimizing the number of pixels used. Our results show that we can operate at roughly 70mW of power, while continuously estimating eye gaze at the rate of 30 Hz with errors of roughly 3 degrees.
Keywords: eye tracking; lifelog; neural network.
Figures
References
-
- A neural-based remote eye gaze tracker under natural head motion. Computer Methods and Programs in Biomedicine. 2008;92(1):66–78. - PubMed
-
- Applied Science Laboratories [accessed April 7, 2013];NeXtGeneration Mobile Eye: Mobile Eye XG. 2013 http://www.asleyetracking.com/Site/Portals/0/MobileEyeXGwireless.pdf Online.
-
- Baluja S, Pomerleau D. Technical report. Pittsburgh, PA, USA: 1994. Non-intrusive gaze tracking using artificial neural networks.
-
- Bishop CM. Neural networks for pattern recognition. Oxford university press; 1995.
-
- Cheng D, Vertegaal R. An eye for an eye: a performance evaluation comparison of the lc technologies and tobii eye trackers; Eye Tracking Research & Application: Proceedings of the 2004 symposium on Eye tracking research & applications; 2004.pp. 61–61.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous