

Enhanced crosslimb transfer of force-field learning for dynamics that are identical in extrinsic and joint-based coordinates for both limbs
- PMID: 26581867
- PMCID: PMC4760504
- DOI: 10.1152/jn.00485.2015
Enhanced crosslimb transfer of force-field learning for dynamics that are identical in extrinsic and joint-based coordinates for both limbs
Abstract
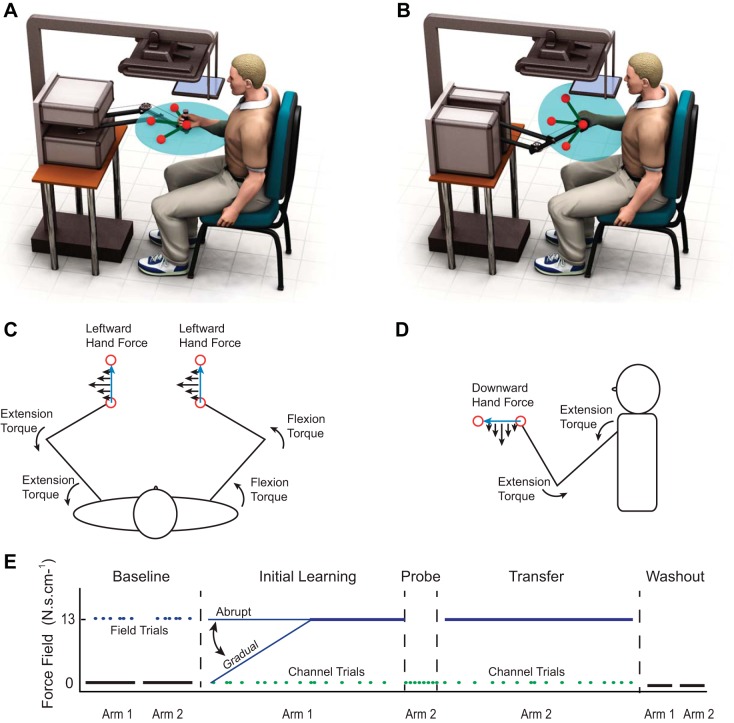
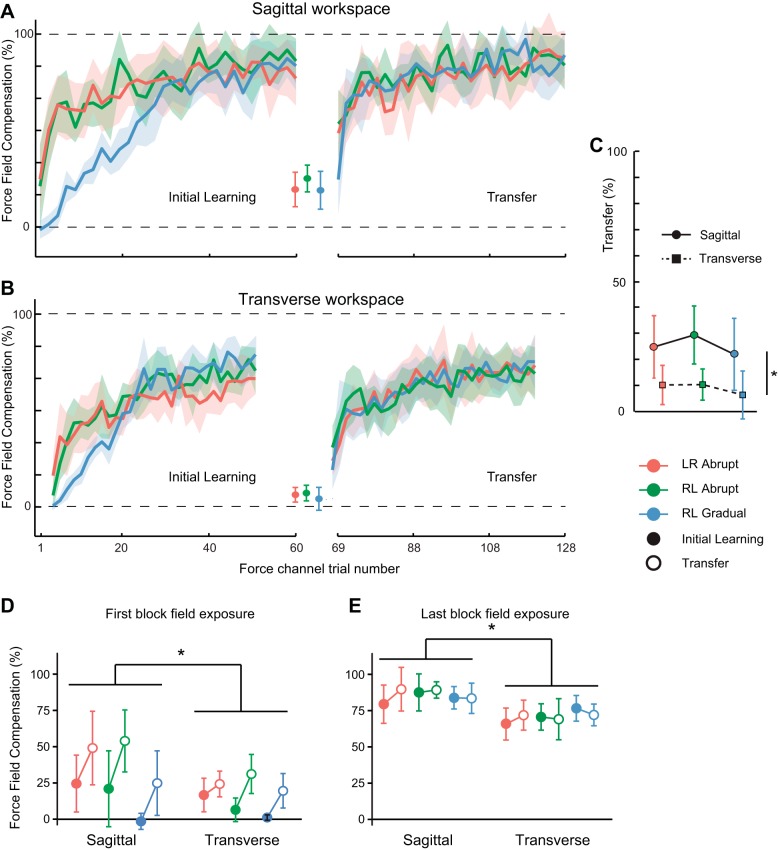
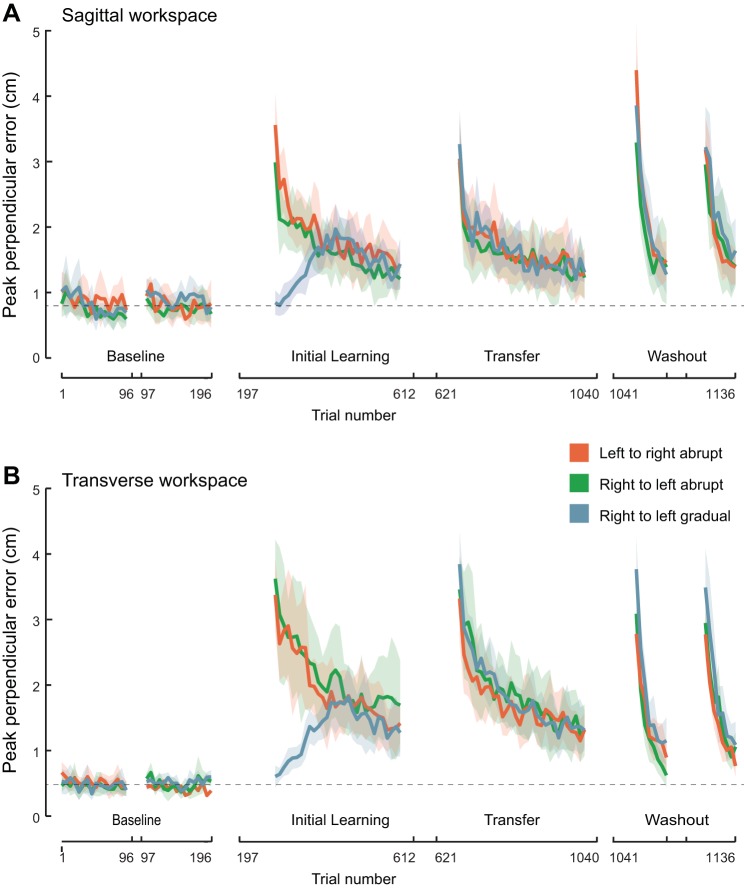
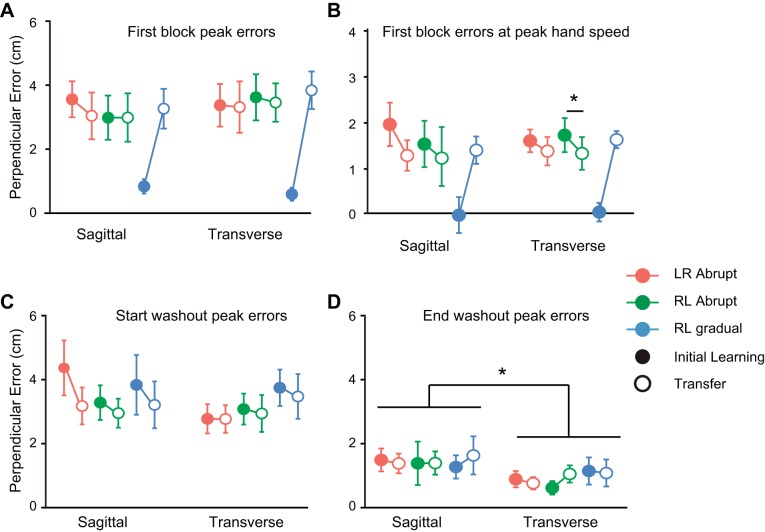
Humans are able to adapt their motor commands to make accurate movements in novel sensorimotor environments, such as when wielding tools that alter limb dynamics. However, it is unclear to what extent sensorimotor representations, obtained through experience with one limb, are available to the opposite, untrained limb and in which form they are available. Here, we compared crosslimb transfer of force-field compensation after participants adapted to a velocity-dependent curl field, oriented either in the sagittal or the transverse plane. Due to the mirror symmetry of the limbs, the force field had identical effects for both limbs in joint and extrinsic coordinates in the sagittal plane but conflicting joint-based effects in the transverse plane. The degree of force-field compensation exhibited by the opposite arm in probe trials immediately after initial learning was significantly greater after sagittal (26 ± 5%) than transverse plane adaptation (9 ± 4%; P < 0.001), irrespective of whether participants learned initially with the left or the right arm or via abrupt or gradual exposure to the force field. Thus transfer was impaired when the orientation of imposed dynamics conflicted in intrinsic coordinates for the two limbs. The data reveal that neural representations of novel dynamics are only partially available to the opposite limb, since transfer is incomplete even when force-field perturbation is spatially compatible for the two limbs, according to both intrinsic and extrinsic coordinates.
Keywords: coordinate frame; interlimb transfer; motor learning; sensorimotor adaptation.
Copyright © 2016 the American Physiological Society.
Figures
References
-
- Buneo CA, Andersen RA. The posterior parietal cortex: sensorimotor interface for the planning and online control of visually guided movements. Neuropsychologia 44: 2594–2606, 2006. - PubMed
-
- Burgess JK, Bareither R, Patton JL. Single limb performance following contralateral bimanual limb training. IEEE Trans Neural Syst Rehabil Eng 15: 347–355, 2007. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources