

Improving robustness against electrode shift of high density EMG for myoelectric control through common spatial patterns
- PMID: 26631105
- PMCID: PMC4668610
- DOI: 10.1186/s12984-015-0102-9
Improving robustness against electrode shift of high density EMG for myoelectric control through common spatial patterns
Abstract
Background: Most prosthetic myoelectric control studies have concentrated on low density (less than 16 electrodes, LD) electromyography (EMG) signals, due to its better clinical applicability and low computation complexity compared with high density (more than 16 electrodes, HD) EMG signals. Since HD EMG electrodes have been developed more conveniently to wear with respect to the previous versions recently, HD EMG signals become an alternative for myoelectric prostheses. The electrode shift, which may occur during repositioning or donning/doffing of the prosthetic socket, is one of the main reasons for degradation in classification accuracy (CA).
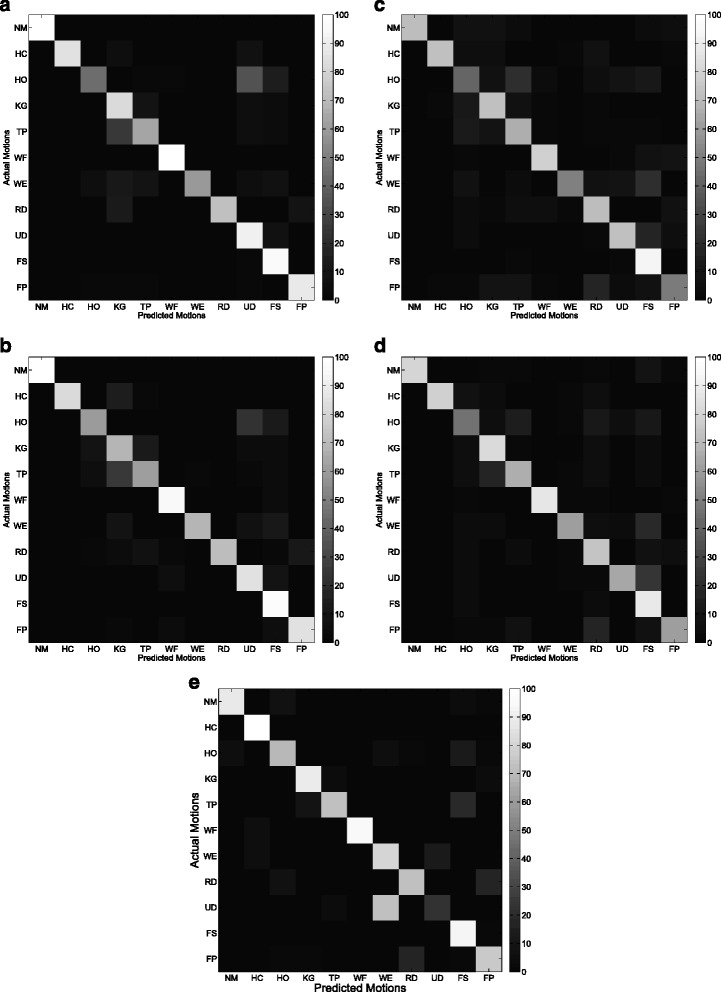
Methods: HD EMG signals acquired from the forearm of the subjects were used for pattern recognition-based myoelectric control in this study. Multiclass common spatial patterns (CSP) with two types of schemes, namely one versus one (CSP-OvO) and one versus rest (CSP-OvR), were used for feature extraction to improve the robustness against electrode shift for myoelectric control. Shift transversal (ST1 and ST2) and longitudinal (SL1 and SL2) to the direction of the muscle fibers were taken into consideration. We tested nine intact-limb subjects for eleven hand and wrist motions. The CSP features (CSP-OvO and CSP-OvR) were compared with three commonly used features, namely time-domain (TD) features, time-domain autoregressive (TDAR) features and variogram (Variog) features.
Results: Compared with the TD features, the CSP features significantly improved the CA over 10 % in all shift configurations (ST1, ST2, SL1 and SL2). Compared with the TDAR features, a. the CSP-OvO feature significantly improved the average CA over 5 % in all shift configurations; b. the CSP-OvR feature significantly improved the average CA in shift configurations ST1, SL1 and SL2. Compared with the Variog features, the CSP features significantly improved the average CA in longitudinal shift configurations (SL1 and SL2).
Conclusion: The results demonstrated that the CSP features significantly improved the robustness against electrode shift for myoelectric control with respect to the commonly used features.
Figures











References
-
- Farina D, Jiang N, Rehbaum H, Holobar A, Graimann B, Dietl H, et al. The extraction of neural information from the surface EMG for the control of upper-limb prostheses: emerging avenues and challenges. IEEE Trans. Neural Syst Rehabil Eng. 2014;22(4):797–809. doi: 10.1109/TNSRE.2014.2305111. - DOI - PubMed
-
- Graupe D, Cline WK. Functional separation of EMG signals via ARMA identification methods for prosthesis control purposes. IEEE Trans Syst Man Cybern. 1975;SMC-5(2):252–9. doi: 10.1109/TSMC.1975.5408479. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
