

Automated Reconstruction of Three-Dimensional Fish Motion, Forces, and Torques
- PMID: 26752597
- PMCID: PMC4713831
- DOI: 10.1371/journal.pone.0146682
Automated Reconstruction of Three-Dimensional Fish Motion, Forces, and Torques
Abstract
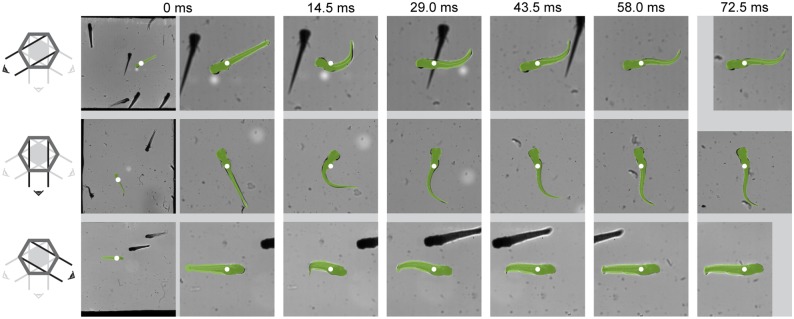
Fish can move freely through the water column and make complex three-dimensional motions to explore their environment, escape or feed. Nevertheless, the majority of swimming studies is currently limited to two-dimensional analyses. Accurate experimental quantification of changes in body shape, position and orientation (swimming kinematics) in three dimensions is therefore essential to advance biomechanical research of fish swimming. Here, we present a validated method that automatically tracks a swimming fish in three dimensions from multi-camera high-speed video. We use an optimisation procedure to fit a parameterised, morphology-based fish model to each set of video images. This results in a time sequence of position, orientation and body curvature. We post-process this data to derive additional kinematic parameters (e.g. velocities, accelerations) and propose an inverse-dynamics method to compute the resultant forces and torques during swimming. The presented method for quantifying 3D fish motion paves the way for future analyses of swimming biomechanics.
Conflict of interest statement
Figures







References
-
- Hunter JR. Swimming and feeding behavior of larval anchovy Engraulis mordax. Fish Bull. 1972;70(82):1–834.
-
- Eloy C. Optimal Strouhal number for swimming animals. J Fluids Struct. 2012;30:205–218. 10.1016/j.jfluidstructs.2012.02.008 - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
