

Biomechanical walking mechanisms underlying the metabolic reduction caused by an autonomous exoskeleton
- PMID: 26817449
- PMCID: PMC4730720
- DOI: 10.1186/s12984-016-0111-3
Biomechanical walking mechanisms underlying the metabolic reduction caused by an autonomous exoskeleton
Abstract
Background: Ankle exoskeletons can now reduce the metabolic cost of walking in humans without leg disability, but the biomechanical mechanisms that underlie this augmentation are not fully understood. In this study, we analyze the energetics and lower limb mechanics of human study participants walking with and without an active autonomous ankle exoskeleton previously shown to reduce the metabolic cost of walking.
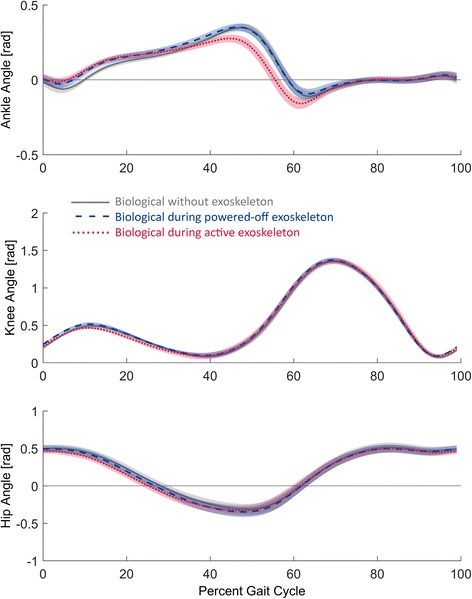
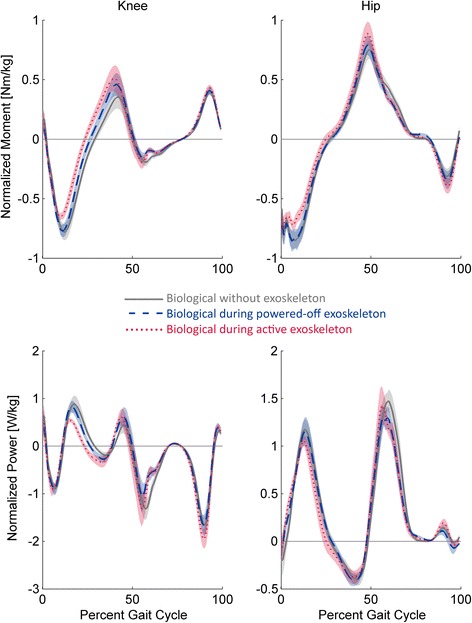
Methods: We measured the metabolic, kinetic and kinematic effects of wearing a battery powered bilateral ankle exoskeleton. Six participants walked on a level treadmill at 1.4 m/s under three conditions: exoskeleton not worn, exoskeleton worn in a powered-on state, and exoskeleton worn in a powered-off state. Metabolic rates were measured with a portable pulmonary gas exchange unit, body marker positions with a motion capture system, and ground reaction forces with a force-plate instrumented treadmill. Inverse dynamics were then used to estimate ankle, knee and hip torques and mechanical powers.
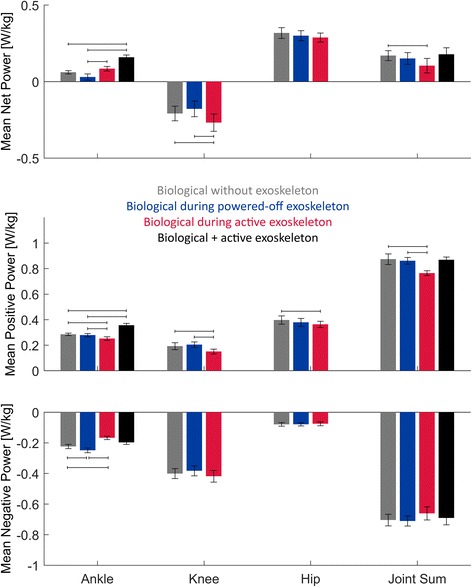
Results: The active ankle exoskeleton provided a mean positive power of 0.105 ± 0.008 W/kg per leg during the push-off region of stance phase. The net metabolic cost of walking with the active exoskeleton (3.28 ± 0.10 W/kg) was an 11 ± 4 % (p = 0.019) reduction compared to the cost of walking without the exoskeleton (3.71 ± 0.14 W/kg). Wearing the ankle exoskeleton significantly reduced the mean positive power of the ankle joint by 0.033 ± 0.006 W/kg (p = 0.007), the knee joint by 0.042 ± 0.015 W/kg (p = 0.020), and the hip joint by 0.034 ± 0.009 W/kg (p = 0.006).
Conclusions: This study shows that the ankle exoskeleton does not exclusively reduce positive mechanical power at the ankle joint, but also mitigates positive power at the knee and hip. Furthermore, the active ankle exoskeleton did not simply replace biological ankle function in walking, but rather augmented the total (biological + exoskeletal) ankle moment and power. This study underscores the need for comprehensive models of human-exoskeleton interaction and global optimization methods for the discovery of new control strategies that optimize the physiological impact of leg exoskeletons.
Figures



References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
