

Cockroaches traverse crevices, crawl rapidly in confined spaces, and inspire a soft, legged robot
- PMID: 26858443
- PMCID: PMC4776529
- DOI: 10.1073/pnas.1514591113
Cockroaches traverse crevices, crawl rapidly in confined spaces, and inspire a soft, legged robot
Abstract
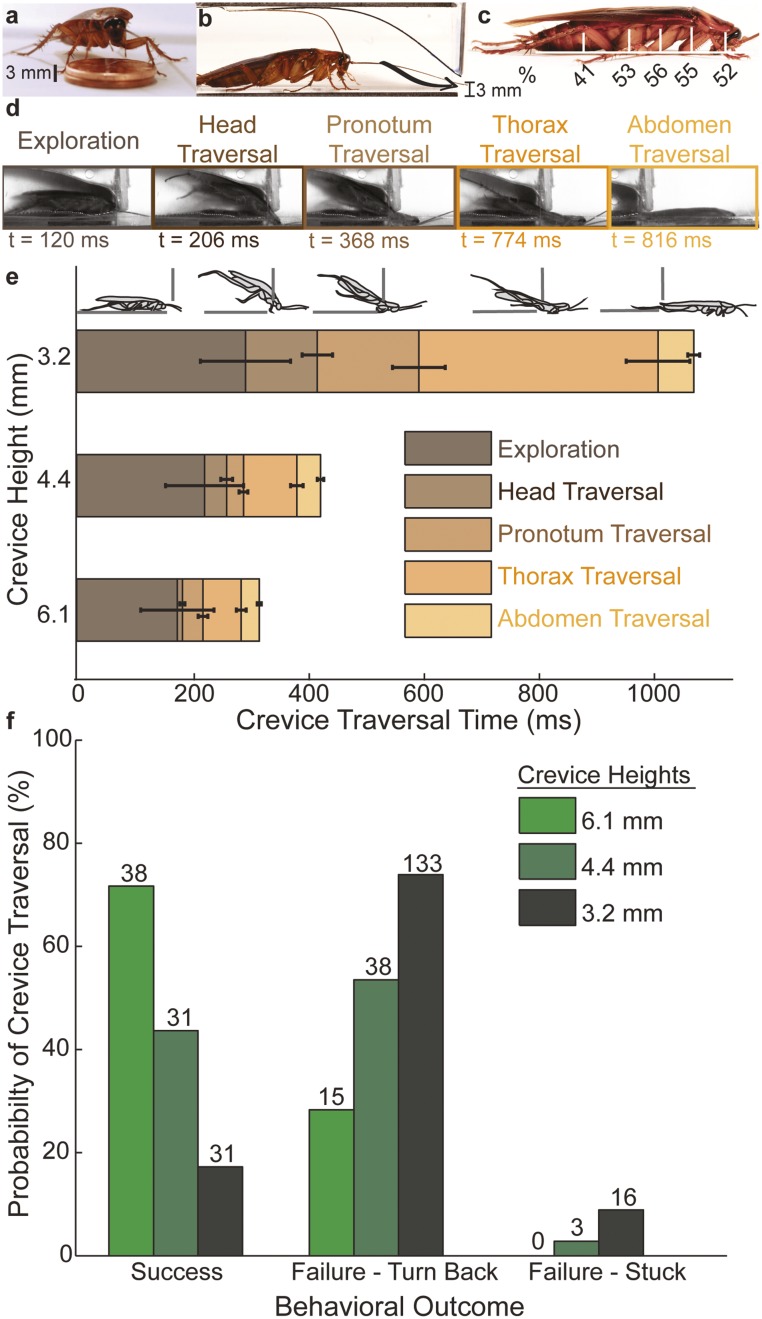
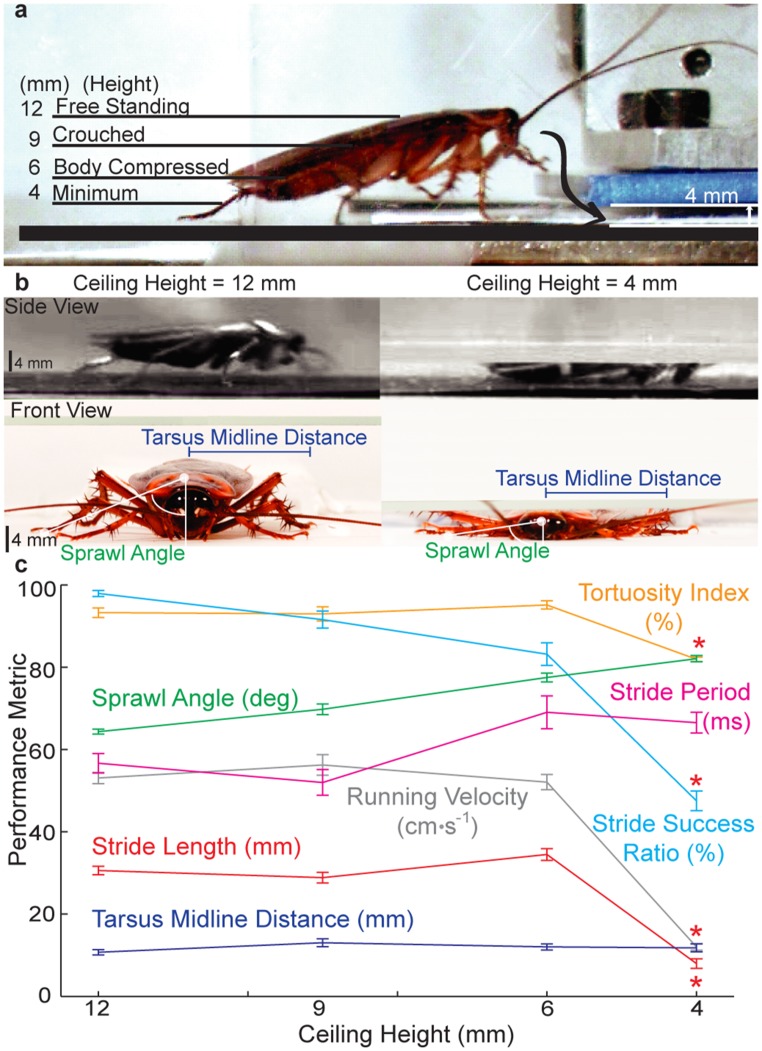
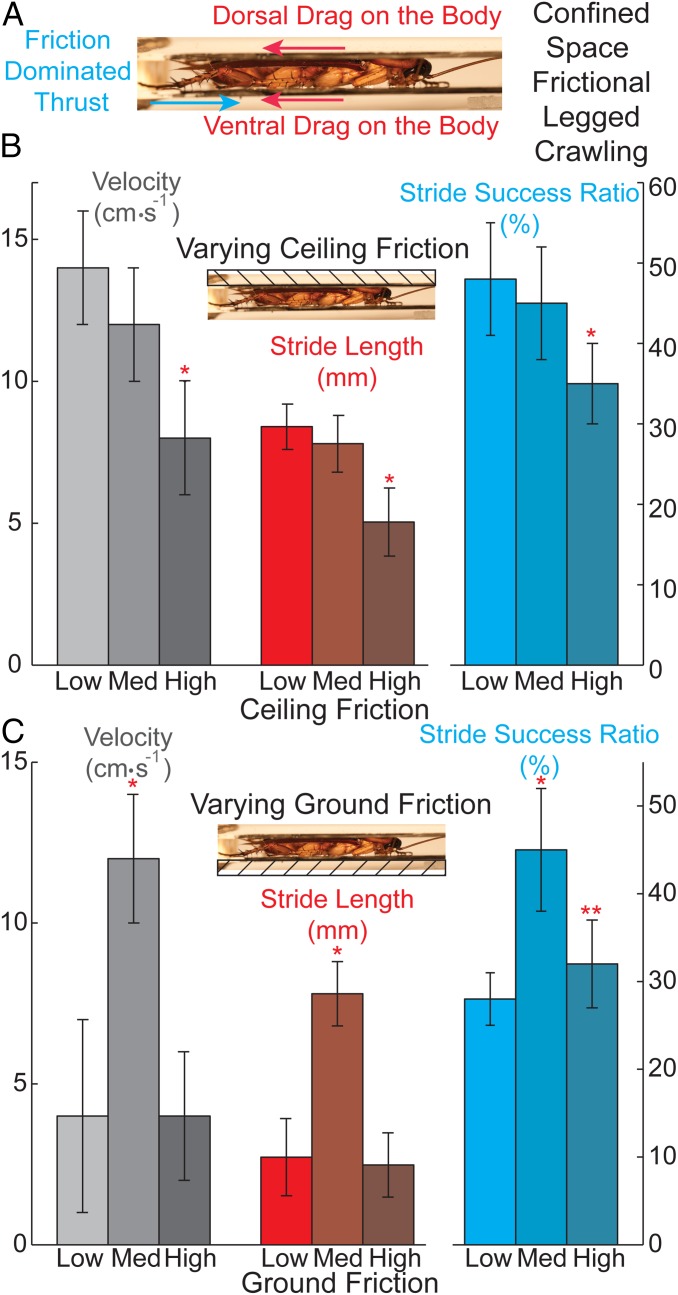
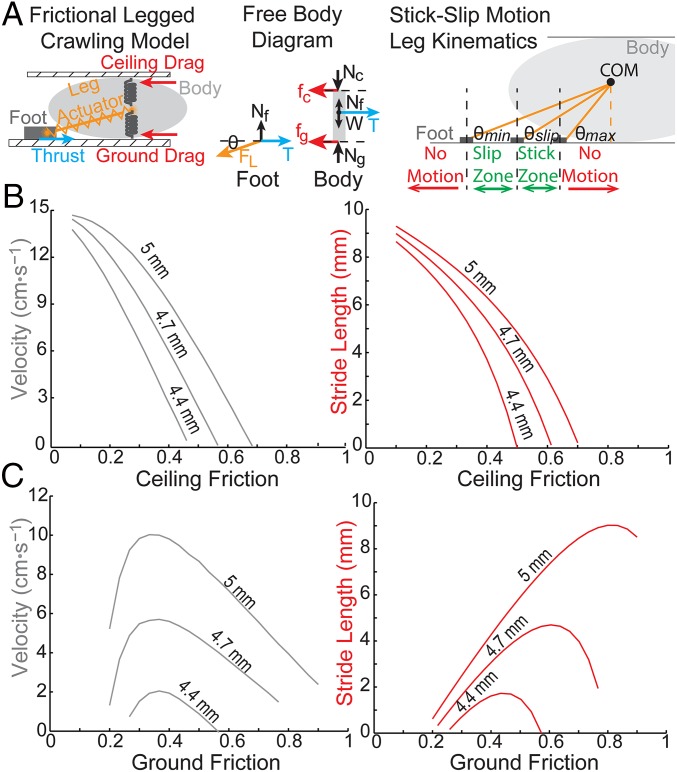
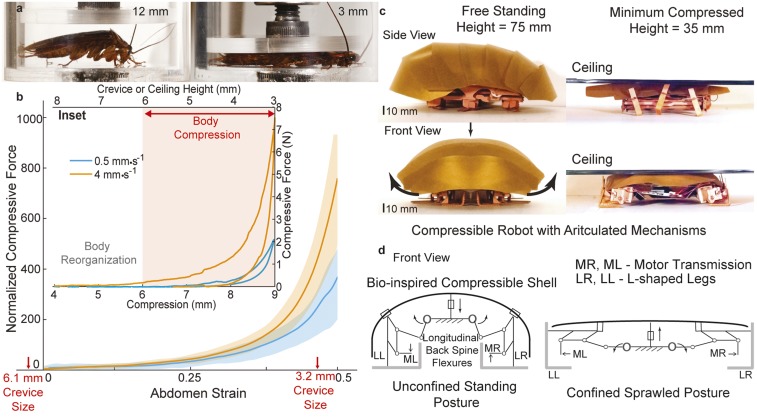
Jointed exoskeletons permit rapid appendage-driven locomotion but retain the soft-bodied, shape-changing ability to explore confined environments. We challenged cockroaches with horizontal crevices smaller than a quarter of their standing body height. Cockroaches rapidly traversed crevices in 300-800 ms by compressing their body 40-60%. High-speed videography revealed crevice negotiation to be a complex, discontinuous maneuver. After traversing horizontal crevices to enter a vertically confined space, cockroaches crawled at velocities approaching 60 cm⋅s(-1), despite body compression and postural changes. Running velocity, stride length, and stride period only decreased at the smallest crevice height (4 mm), whereas slipping and the probability of zigzag paths increased. To explain confined-space running performance limits, we altered ceiling and ground friction. Increased ceiling friction decreased velocity by decreasing stride length and increasing slipping. Increased ground friction resulted in velocity and stride length attaining a maximum at intermediate friction levels. These data support a model of an unexplored mode of locomotion--"body-friction legged crawling" with body drag, friction-dominated leg thrust, but no media flow as in air, water, or sand. To define the limits of body compression in confined spaces, we conducted dynamic compressive cycle tests on living animals. Exoskeletal strength allowed cockroaches to withstand forces 300 times body weight when traversing the smallest crevices and up to nearly 900 times body weight without injury. Cockroach exoskeletons provided biological inspiration for the manufacture of an origami-style, soft, legged robot that can locomote rapidly in both open and confined spaces.
Keywords: confined; crawling; exoskeleton; locomotion; soft robotics.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

Similar articles
-
Body-terrain interaction affects large bump traversal of insects and legged robots.Bioinspir Biomim. 2018 Feb 2;13(2):026005. doi: 10.1088/1748-3190/aaa2d0. Bioinspir Biomim. 2018. PMID: 29394159
-
Terradynamically streamlined shapes in animals and robots enhance traversability through densely cluttered terrain.Bioinspir Biomim. 2015 Jun 22;10(4):046003. doi: 10.1088/1748-3190/10/4/046003. Bioinspir Biomim. 2015. PMID: 26098002
-
Mechanics of a rapid running insect: two-, four- and six-legged locomotion.J Exp Biol. 1991 Mar;156:215-31. doi: 10.1242/jeb.156.1.215. J Exp Biol. 1991. PMID: 2051129
-
Lateral Oscillation and Body Compliance Help Snakes and Snake Robots Stably Traverse Large, Smooth Obstacles.Integr Comp Biol. 2020 Jul 1;60(1):171-179. doi: 10.1093/icb/icaa013. Integr Comp Biol. 2020. PMID: 32215569 Review.
-
Recent Progress in the Physical Principles of Dynamic Ground Self-Righting.Integr Comp Biol. 2024 Sep 27;64(3):674-693. doi: 10.1093/icb/icae124. Integr Comp Biol. 2024. PMID: 39066497 Review.
Cited by
-
An insect-inspired asymmetric hinge in a double-layer membrane.Proc Natl Acad Sci U S A. 2022 Nov 8;119(45):e2211861119. doi: 10.1073/pnas.2211861119. Epub 2022 Nov 2. Proc Natl Acad Sci U S A. 2022. PMID: 36322770 Free PMC article.
-
Diabolical ironclad beetles inspire tougher joints for engineering applications.Nature. 2020 Oct;586(7830):502-504. doi: 10.1038/d41586-020-02840-1. Nature. 2020. PMID: 33087908 No abstract available.
-
Peking geckos (Gekko swinhonis) traversing upward steps: the effect of step height on the transition from horizontal to vertical locomotion.J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2022 May;208(3):421-433. doi: 10.1007/s00359-022-01548-z. Epub 2022 Apr 1. J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2022. PMID: 35362821
-
Close encounters of three kinds: impacts of leg, wing and body collisions on flight performance in carpenter bees.J Exp Biol. 2023 May 1;226(9):jeb245334. doi: 10.1242/jeb.245334. Epub 2023 May 5. J Exp Biol. 2023. PMID: 37066861 Free PMC article.
-
Moving in an Uncertain World: Robust and Adaptive Control of Locomotion from Organisms to Machine Intelligence.Integr Comp Biol. 2024 Nov 21;64(5):1390-1407. doi: 10.1093/icb/icae121. Integr Comp Biol. 2024. PMID: 39090982 Free PMC article. Review.
References
-
- Li C, Zhang T, Goldman DI. A terradynamics of legged locomotion on granular media. Science. 2013;339(6126):1408–1412. - PubMed
-
- Dickinson MH, et al. How animals move: An integrative view. Science. 2000;288(5463):100–106. - PubMed
-
- Sponberg S, Full RJ. Neuromechanical response of musculo-skeletal structures in cockroaches during rapid running on rough terrain. J Exp Biol. 2008;211(Pt 3):433–446. - PubMed
-
- Spence AJ, Revzen S, Seipel J, Mullens C, Full RJ. Insects running on elastic surfaces. J Exp Biol. 2010;213(11):1907–1920. - PubMed
-
- Spagna JC, Goldman DI, Lin P-C, Koditschek DE, Full RJ. Distributed mechanical feedback in arthropods and robots simplifies control of rapid running on challenging terrain. Bioinspir Biomim. 2007;2(1):9–18. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
