

Confidence and certainty: distinct probabilistic quantities for different goals
- PMID: 26906503
- PMCID: PMC5378479
- DOI: 10.1038/nn.4240
Confidence and certainty: distinct probabilistic quantities for different goals
Abstract
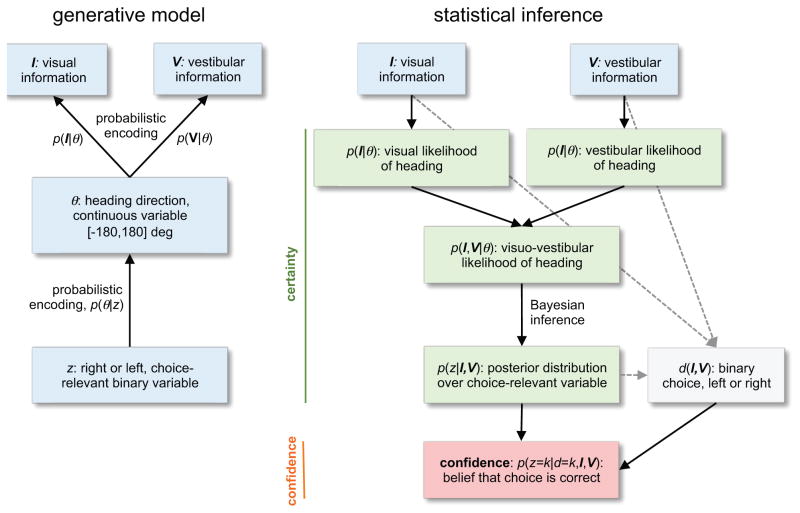
When facing uncertainty, adaptive behavioral strategies demand that the brain performs probabilistic computations. In this probabilistic framework, the notion of certainty and confidence would appear to be closely related, so much so that it is tempting to conclude that these two concepts are one and the same. We argue that there are computational reasons to distinguish between these two concepts. Specifically, we propose that confidence should be defined as the probability that a decision or a proposition, overt or covert, is correct given the evidence, a critical quantity in complex sequential decisions. We suggest that the term certainty should be reserved to refer to the encoding of all other probability distributions over sensory and cognitive variables. We also discuss strategies for studying the neural codes for confidence and certainty and argue that clear definitions of neural codes are essential to understanding the relative contributions of various cortical areas to decision making.
Conflict of interest statement
The authors declare no competing financial interests.
Figures
References
-
- Meyniel F, Sigman M, Mainen ZF. Confidence as Bayesian probability: from neural origins to behavior. Neuron. 2015;88:78–92. - PubMed
-
- Vickers D. Decision Processes in Visual Perception. Academic Press; New York: 1979.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
