

Robot Guidance Using Machine Vision Techniques in Industrial Environments: A Comparative Review
- PMID: 26959030
- PMCID: PMC4813910
- DOI: 10.3390/s16030335
Robot Guidance Using Machine Vision Techniques in Industrial Environments: A Comparative Review
Abstract
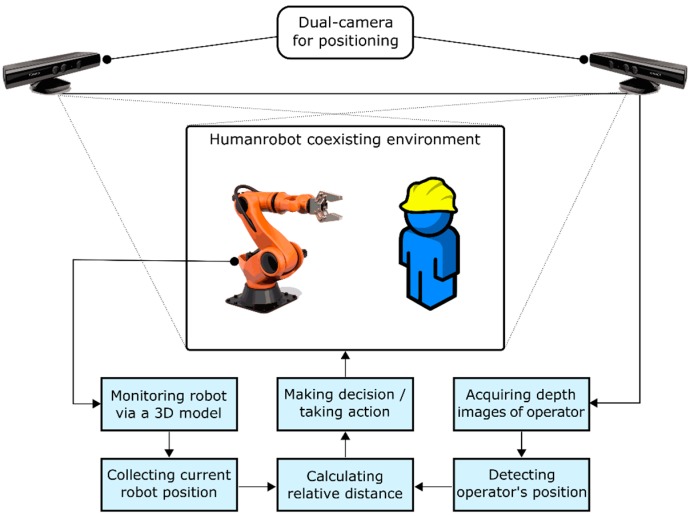
In the factory of the future, most of the operations will be done by autonomous robots that need visual feedback to move around the working space avoiding obstacles, to work collaboratively with humans, to identify and locate the working parts, to complete the information provided by other sensors to improve their positioning accuracy, etc. Different vision techniques, such as photogrammetry, stereo vision, structured light, time of flight and laser triangulation, among others, are widely used for inspection and quality control processes in the industry and now for robot guidance. Choosing which type of vision system to use is highly dependent on the parts that need to be located or measured. Thus, in this paper a comparative review of different machine vision techniques for robot guidance is presented. This work analyzes accuracy, range and weight of the sensors, safety, processing time and environmental influences. Researchers and developers can take it as a background information for their future works.
Keywords: 3D sensors; machine vision; part localization; perception for manipulation; robot guidance; robot pose.
Figures

















References
-
- Deane P.M. The First Industrial Revolution. Cambridge University Press; Cambridge, UK: 1979.
-
- Kanji G.K. Total quality management: the second industrial revolution. Total Qual. Manag. Bus. Excell. 1990;1:3–12. doi: 10.1080/09544129000000001. - DOI
-
- Rifkin J. The third industrial revolution. Eng. Technol. 2008;3:26–27. doi: 10.1049/et:20080718. - DOI
-
- Kagermann H., Wahlster W., Helbig J. Recommendations for Implementing the Strategic Initiative Industrie 4.0: Final Report of the Industrie 4.0 Working Group. Forschungsunion; Berlin, Germany: 2013.
-
- Koeppe R. New industrial robotics: human and robot collaboration for the factory; Proceedings of the 2014 European Conference on Leading Enabling Technologies for Societal Challenges (LET’S 2014); Bologna, Italy. 29 September–1 October 2014.
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
