

An Anchor-Based Pedestrian Navigation Approach Using Only Inertial Sensors
- PMID: 26959031
- PMCID: PMC4813909
- DOI: 10.3390/s16030334
An Anchor-Based Pedestrian Navigation Approach Using Only Inertial Sensors
Abstract
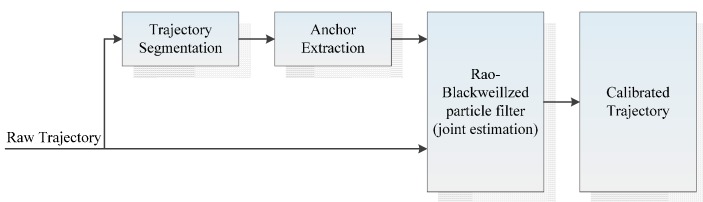
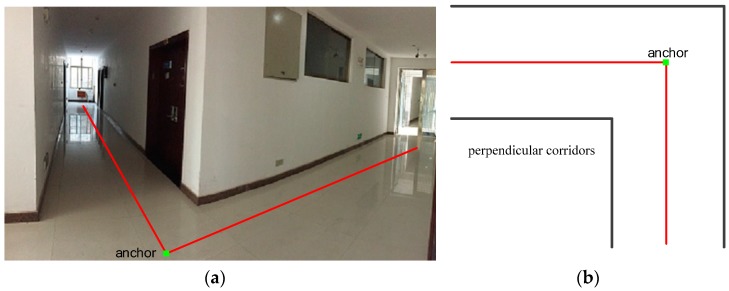
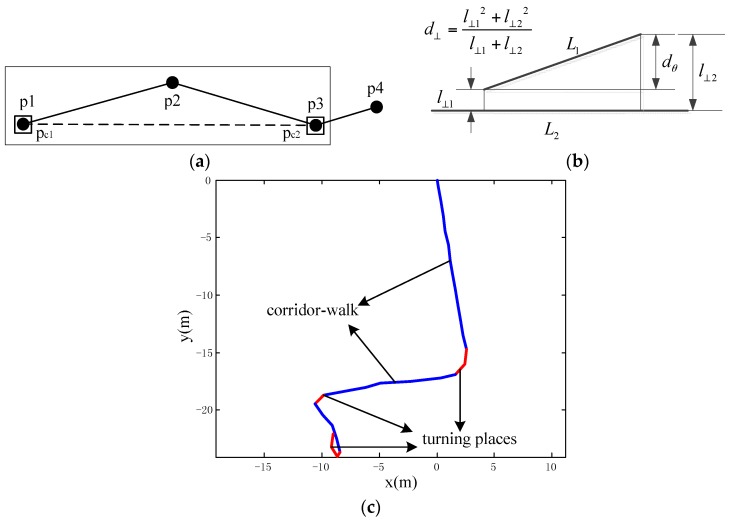
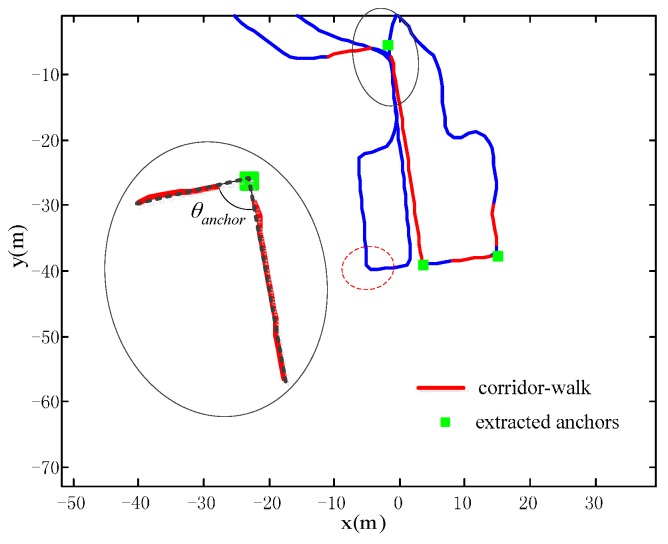
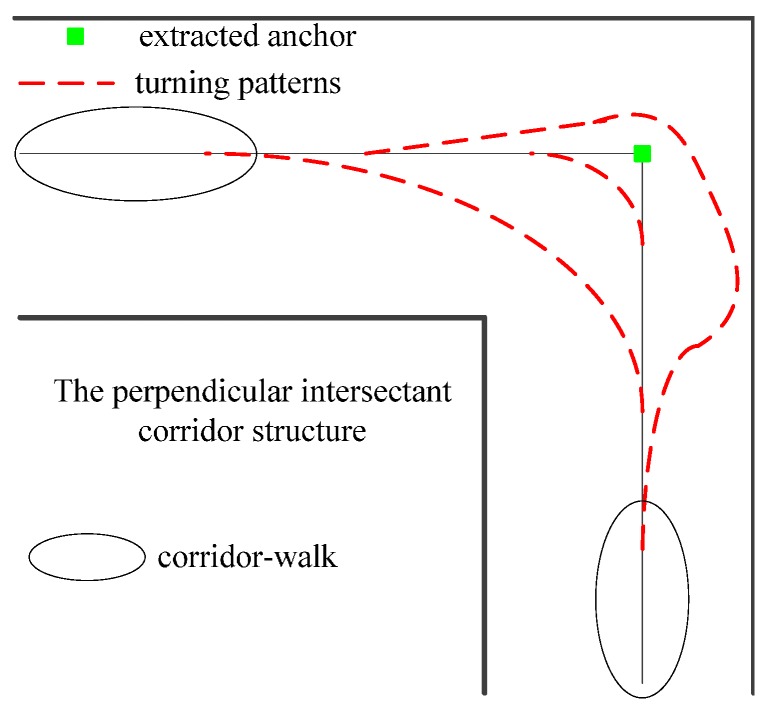
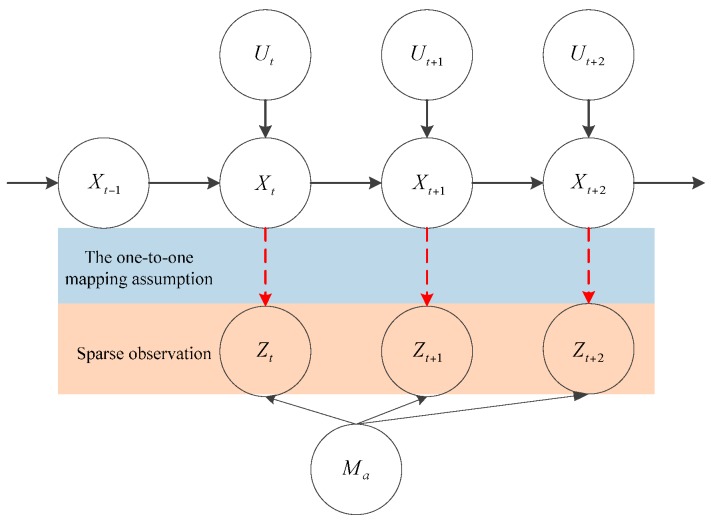
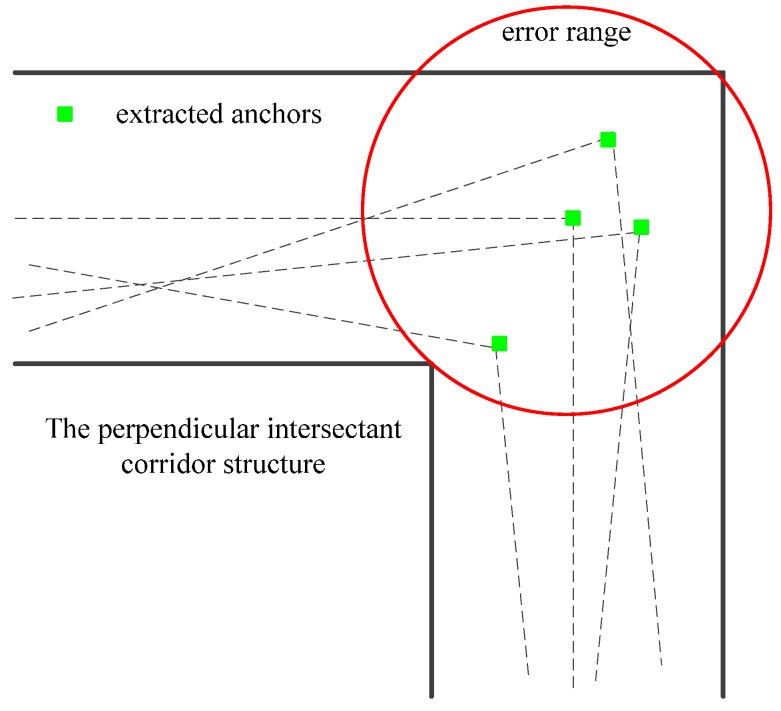
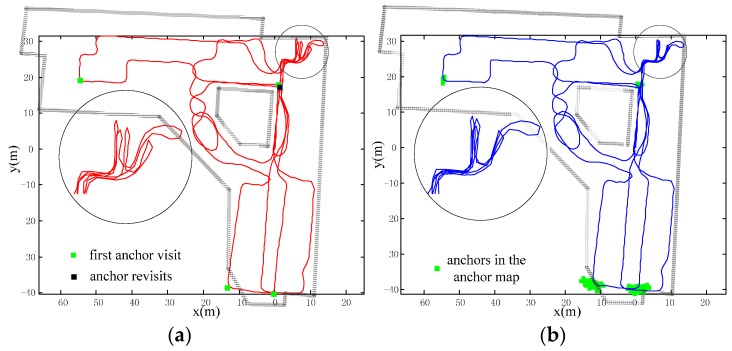
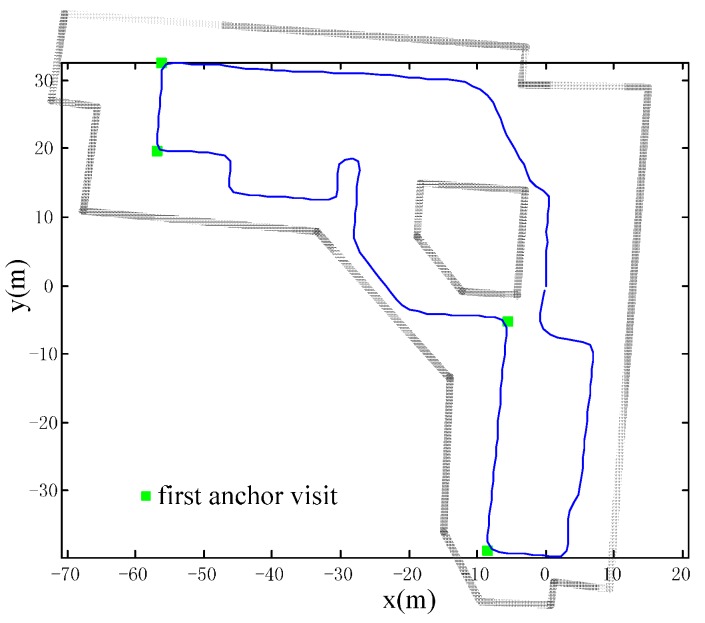
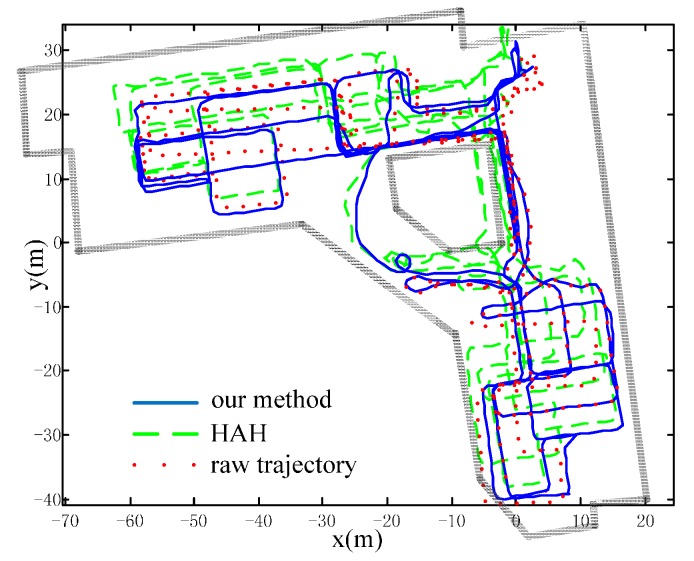
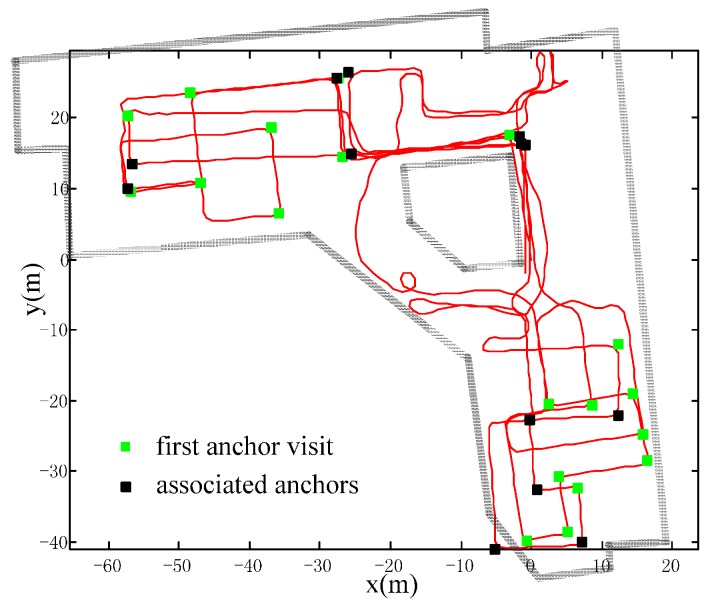
In inertial-based pedestrian navigation, anchors can effectively compensate the positioning errors originating from deviations of Inertial Measurement Units (IMUs), by putting constraints on pedestrians' motions. However, these anchors often need to be deployed beforehand, which can greatly increase system complexity, rendering it unsuitable for emergency response missions. In this paper, we propose an anchor-based pedestrian navigation approach without any additional sensors. The anchors are defined as the intersection points of perpendicular corridors and are considered characteristics of building structures. In contrast to these real anchors, virtual anchors are extracted from the pedestrian's trajectory and are considered as observations of real anchors, which can accordingly be regarded as inferred building structure characteristics. Then a Rao-Blackwellized particle filter (RBPF) is used to solve the joint estimation of positions (trajectory) and maps (anchors) problem. Compared with other building structure-based methods, our method has two advantages. The assumption on building structure is minimum and valid in most cases. Even if the assumption does not stand, the method will not lead to positioning failure. Several real-scenario experiments are conducted to validate the effectiveness and robustness of the proposed method.
Keywords: Rao-Blackwellized particle filter; anchor; building structure; pedestrian navigation.
Figures
References
-
- Li B., Gallagher T., Dempster A.G., Rizos C. How feasible is the use of magnetic field alone for indoor positioning?; Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN); Sydney, Australia. 13–15 November 2012; pp. 1–9.
-
- Woodman O.J. An Introduction to Inertial Navigation. [(accessed on 3 March 2016)]. Available online: https://acristoffers.me/pub-lic/CEFET/2%C2%BA%20Periodo/Introducao%20a%2....
-
- Nilsson J.O., Skog I., Händel P. Performance characterisation of foot-mounted ZUPT-aided INSs and other related systems; Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN); Zurich, Switzerland. 15–17 Septermber 2010.
-
- Moreira A., Nicolau M.J., Meneses F., Costa A. Wi-Fi fingerprinting in the real world-RTLS@UM at the EvAAL competition; Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN); Banff, AB, Canada. 13–16 October 2015; pp. 1–10.
LinkOut - more resources
Full Text Sources
Other Literature Sources
