

Misalignment of the Desired and Measured Center of Pressure Describes Falls Caused by Slip during Turning
- PMID: 27166954
- PMCID: PMC4864216
- DOI: 10.1371/journal.pone.0155418
Misalignment of the Desired and Measured Center of Pressure Describes Falls Caused by Slip during Turning
Abstract
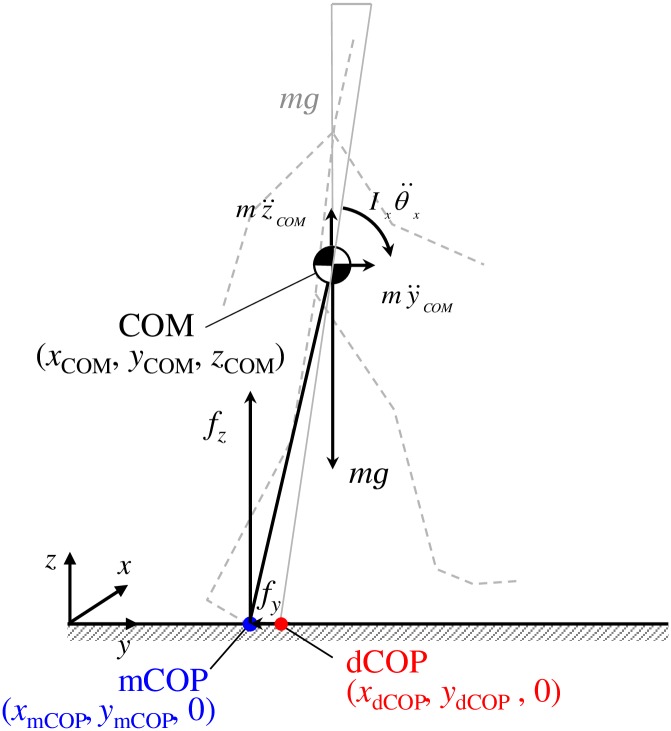
In this study, desired center of pressure (dCOP) was introduced to evaluate dynamic postural stability. The dCOP is defined as a virtual point on the ground, where the moment around the body center of mass (COM) becomes zero when dCOP and the measured COP (mCOP) coincide. We hypothesized that, when the misalignment of the dCOP and mCOP (dCOP-mCOP) increases up to a certain value due to a large perturbation during walking, it becomes difficult to make a compensatory step and to recover balance of COM and to continue gait. Here we tested this hypothesis in slipping during turning. The study involved twelve healthy young adult males with an average age of 21.5±1.9 yrs. The subjects were asked to (1) walk straight and turn 60 degrees to the right with the right foot (spin turn) on a dry floor surface, and (2) walk straight and 60 degrees spin turn to the right on a slippery lubricated surface. The dCOP-mCOP during turning in the slip trial with fall were significantly larger, particularly in x-direction (i.e., the medial-lateral direction during straight walk), than that in no-slip trial and slip trial without fall. The receiver operating characteristic (ROC) analysis indicated that the dCOP-mCOP in x-direction is good indicator of falling (area under the curve (AUC) = 0.93) and the threshold in the dCOP-mCOP in x-direction to distinguish for fall or no-fall was 0.55 m. These results support our hypothesis in slipping during turning.
Conflict of interest statement
Figures







References
-
- Pai YC, Patton J. Center of mass velocity-position predictions for balance control. J Biomech. 1997;30: 347–354. - PubMed
-
- Hof AL, Gazendam M, Sinke WE. The condition for dynamic stability. J Biomech. 2005; 38: 1–8. - PubMed
-
- Hof AL, van Bockel RM, Schoppen T, Postema K. Control of lateral balance in walking. Experimental findings in normal subjects and above-knee amputees. Gait Posture. 2007; 25: 250–258. - PubMed
-
- Cheng KC, McKay SM, King EC, Maki BE. Does aging impair the capacity to use stored visuospatial information or online visual control to guide reach-to-grasp reactions evoked by unpredictable balance perturbation? J Gerontol A Biol Sci Med Sci. 2012; 67: 1238–1245 10.1093/gerona/gls116 - DOI - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
