

Muscle moment arms and sensitivity analysis of a mouse hindlimb musculoskeletal model
- PMID: 27173448
- PMCID: PMC5013061
- DOI: 10.1111/joa.12461
Muscle moment arms and sensitivity analysis of a mouse hindlimb musculoskeletal model
Abstract
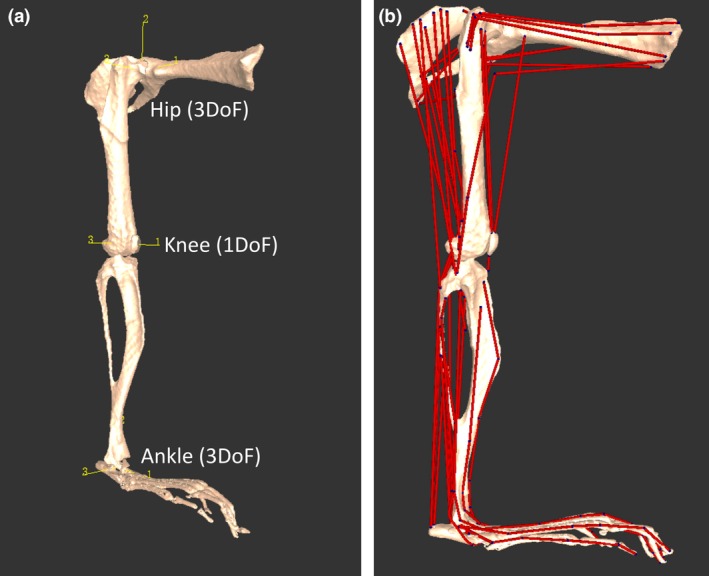
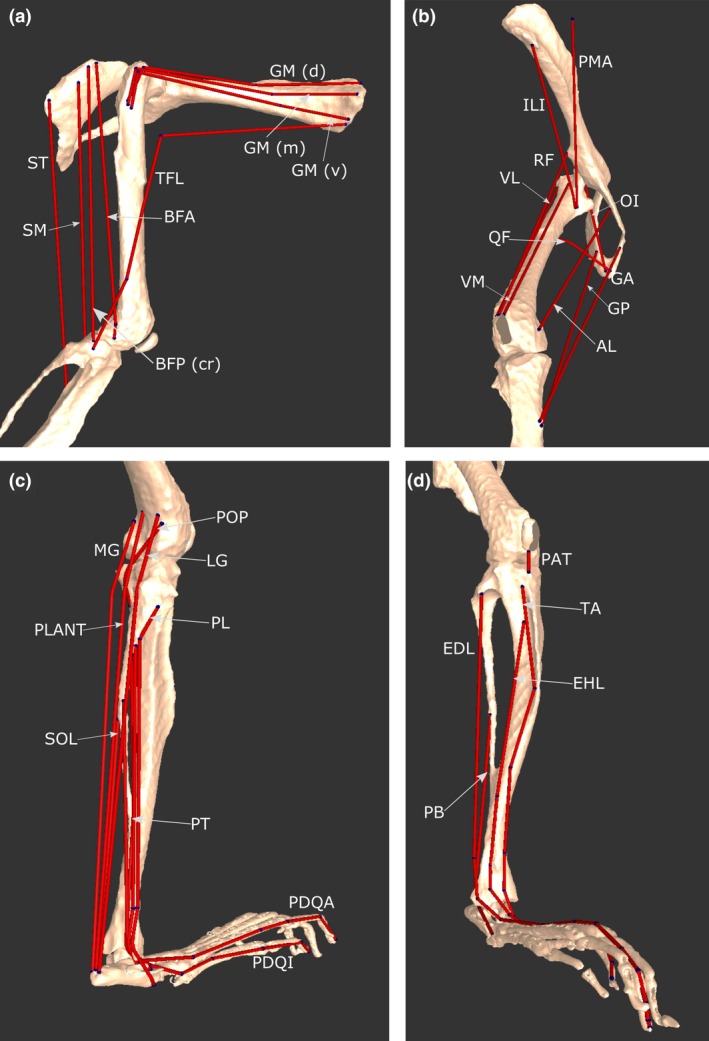
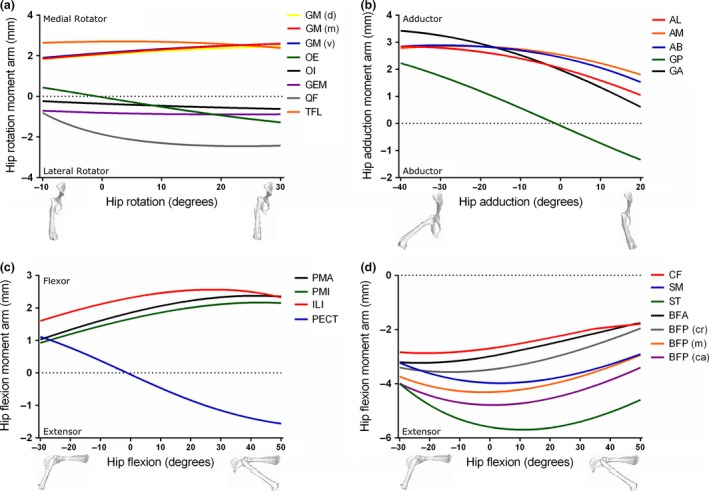
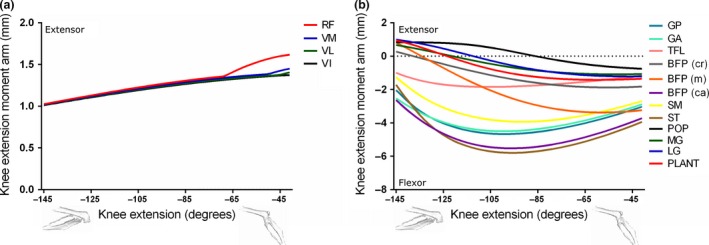
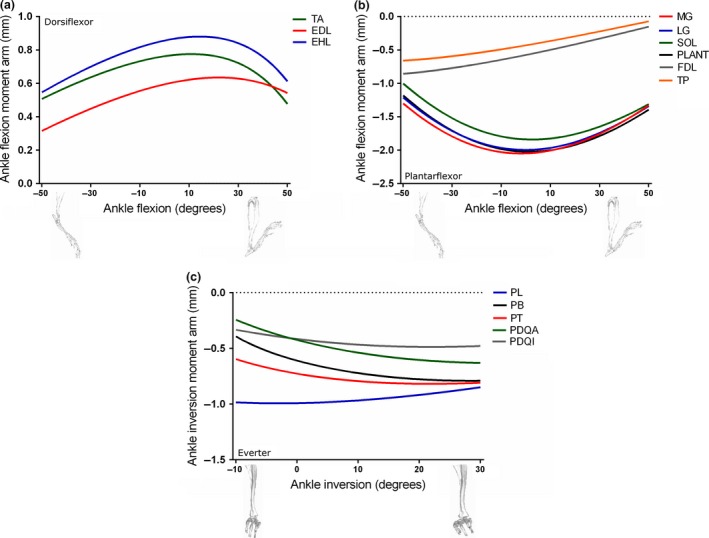
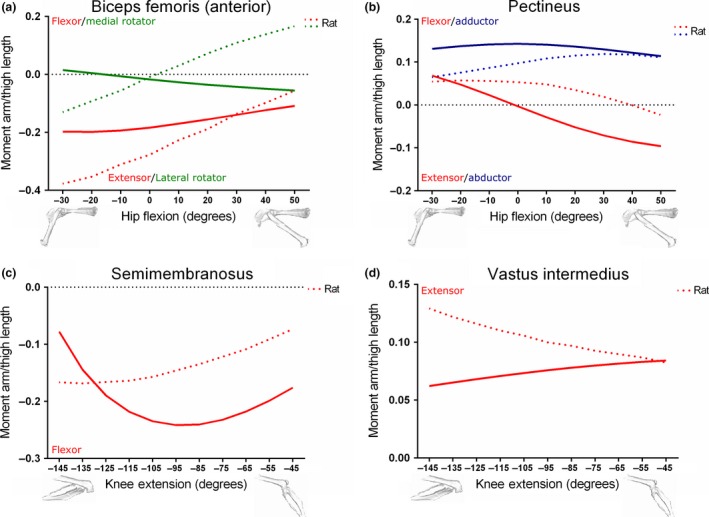
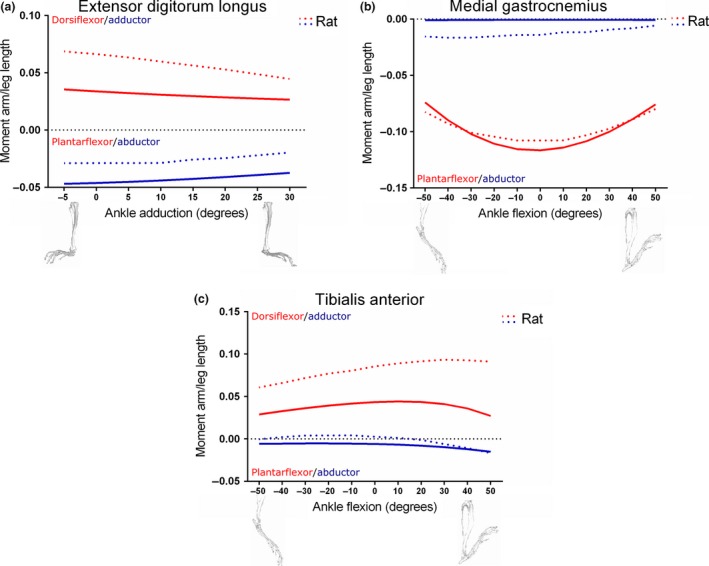
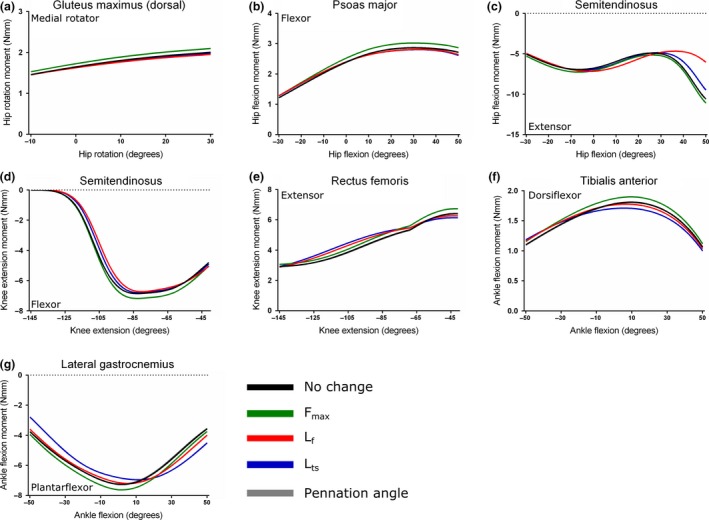
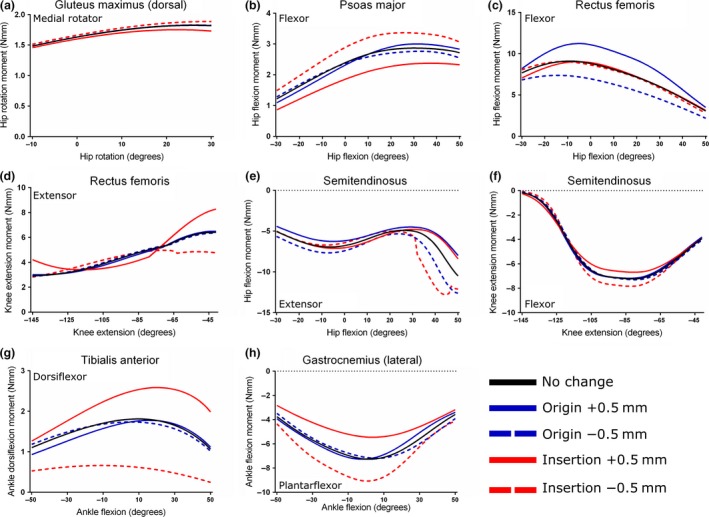
Musculoskeletal modelling has become a valuable tool with which to understand how neural, muscular, skeletal and other tissues are integrated to produce movement. Most musculoskeletal modelling work has to date focused on humans or their close relatives, with few examples of quadrupedal animal limb models. A musculoskeletal model of the mouse hindlimb could have broad utility for questions in medicine, genetics, locomotion and neuroscience. This is due to this species' position as a premier model of human disease, having an array of genetic tools for manipulation of the animal in vivo, and being a small quadruped, a category for which few models exist. Here, the methods used to develop the first three-dimensional (3D) model of a mouse hindlimb and pelvis are described. The model, which represents bones, joints and 39 musculotendon units, was created through a combination of previously gathered muscle architecture data from microdissections, contrast-enhanced micro-computed tomography (CT) scanning and digital segmentation. The model allowed muscle moment arms as well as muscle forces to be estimated for each musculotendon unit throughout a range of joint rotations. Moment arm analysis supported the reliability of musculotendon unit placement within the model, and comparison to a previously published rat hindlimb model further supported the model's reliability. A sensitivity analysis performed on both the force-generating parameters and muscle's attachment points of the model indicated that the maximal isometric muscle moment is generally most sensitive to changes in either tendon slack length or the coordinates of insertion, although the degree to which the moment is affected depends on several factors. This model represents the first step in the creation of a fully dynamic 3D computer model of the mouse hindlimb and pelvis that has application to neuromuscular disease, comparative biomechanics and the neuromechanical basis of movement. Capturing the morphology and dynamics of the limb, it enables future dissection of the complex interactions between the nervous and musculoskeletal systems as well as the environment.
Keywords: biomechanics; muscle architecture; muscle force; musculoskeletal anatomy; rodent.
© 2016 The Authors. Journal of Anatomy published by John Wiley & Sons Ltd on behalf of Anatomical Society.
Figures
References
-
- Aartsma‐Rus A, Van Putten M (2014) Assessing functional performance in the mdx mouse model. J Vis Exp 85, e51303, doi:10.3791/51303. - DOI - PMC - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
