

A novel robot for imposing perturbations during overground walking: mechanism, control and normative stepping responses
- PMID: 27287551
- PMCID: PMC4903006
- DOI: 10.1186/s12984-016-0160-7
A novel robot for imposing perturbations during overground walking: mechanism, control and normative stepping responses
Abstract
Background: The most common approach to studying dynamic balance during walking is by applying perturbations. Previous studies that investigated dynamic balance responses predominantly focused on applying perturbations in frontal plane while walking on treadmill. The goal of our work was to develop balance assessment robot (BAR) that can be used during overground walking and to assess normative balance responses to perturbations in transversal plane in a group of neurologically healthy individuals.
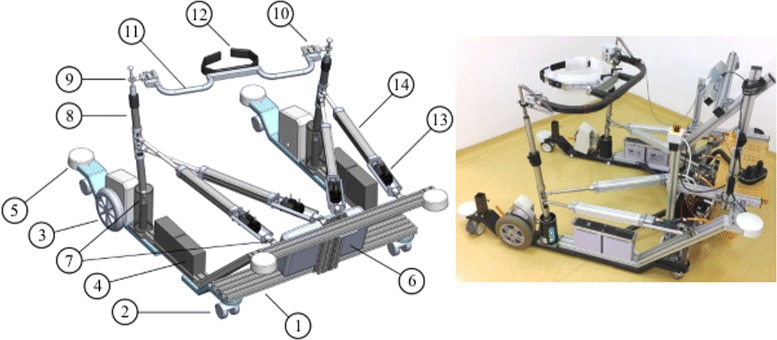
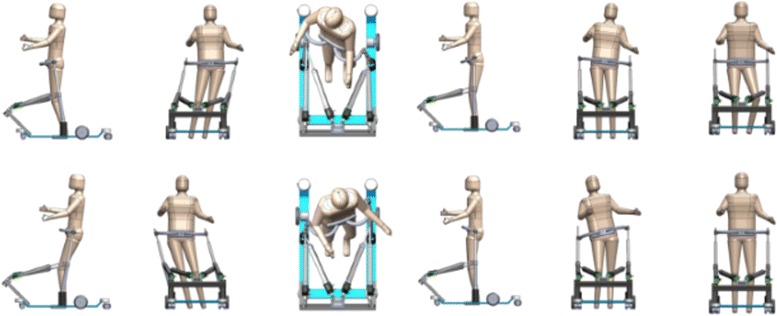
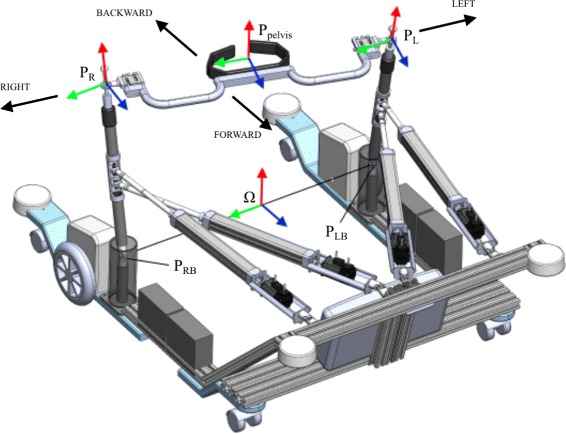
Methods: BAR provides three passive degrees of freedom (DoF) and three actuated DoF in pelvis that are admittance-controlled in such a way that the natural movement of pelvis is not significantly affected. In this study BAR was used to assess normative balance responses in neurologically healthy individuals by applying linear perturbations in frontal and sagittal planes and angular perturbations in transversal plane of pelvis. One way repeated measure ANOVA was used to statistically evaluate the effect of selected perturbations on stepping responses.
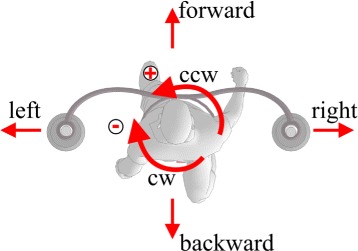
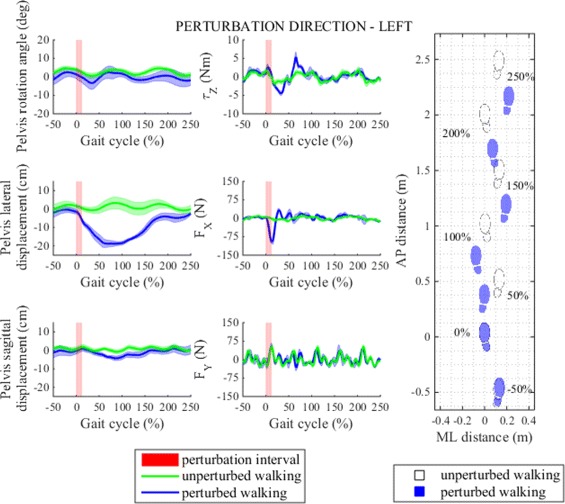
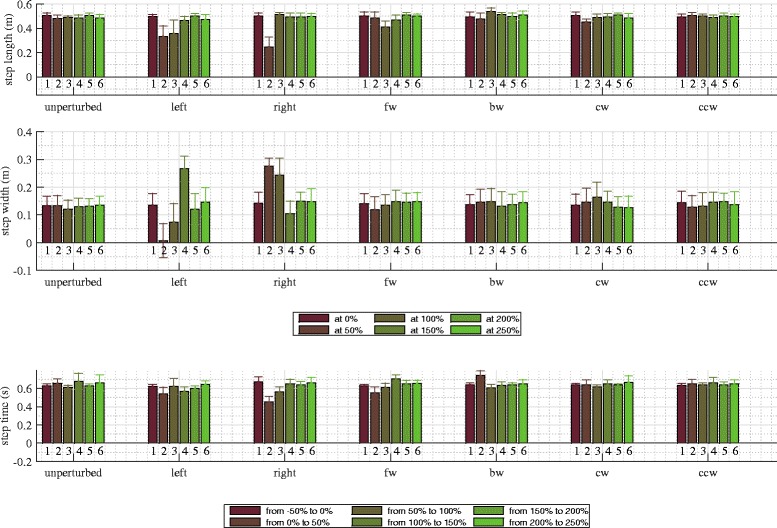
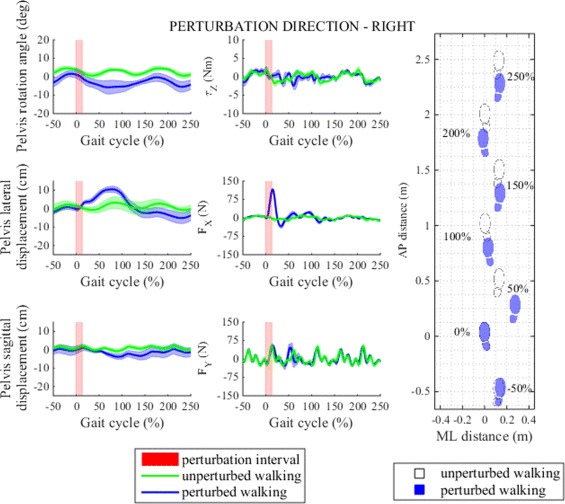
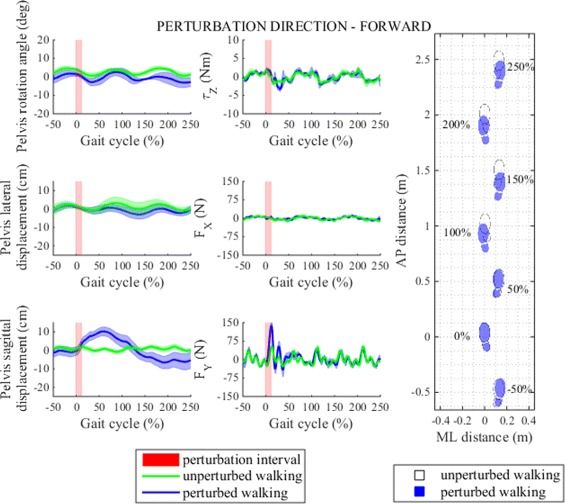
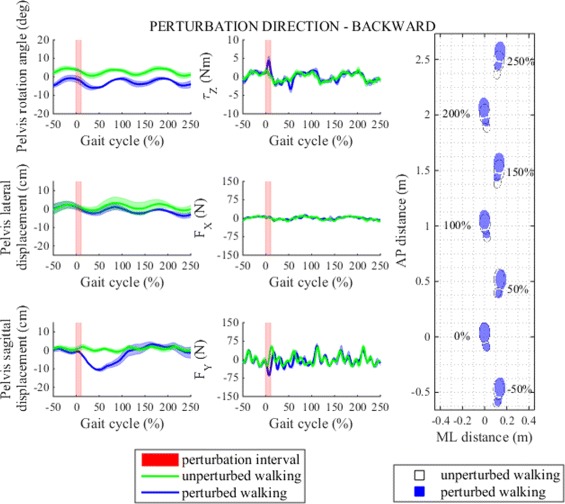
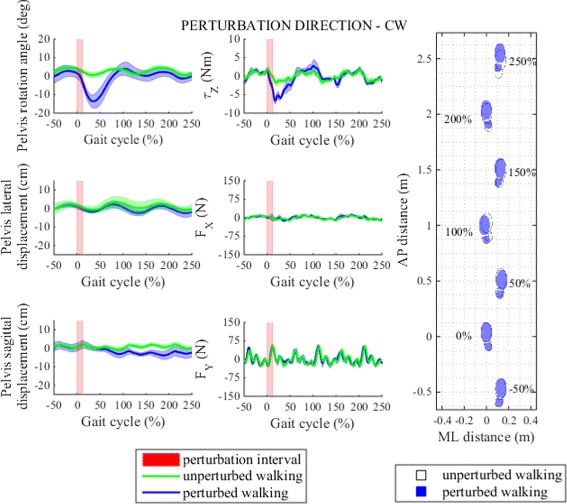
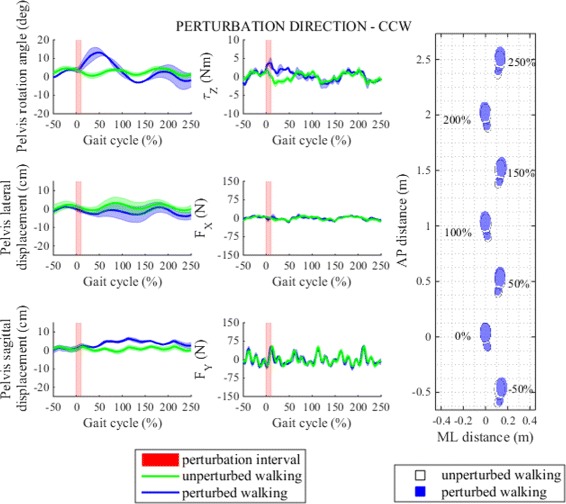
Results: Standard deviations of assessed responses were similar in unperturbed and perturbed walking. Perturbations in frontal direction evoked substantial pelvis displacement and caused statistically significant effect on step length, step width and step time. Likewise, perturbations in sagittal plane also caused statistically significant effect on step length, step width and step time but with less explicit impact on pelvis movement in frontal plane. On the other hand, except from substantial pelvis rotation angular perturbations did not have substantial effect on pelvis movement in frontal and sagittal planes while statistically significant effect was noted only in step length and step width after perturbation in clockwise direction.
Conclusions: Results indicate that the proposed device can repeatedly reproduce similar experimental conditions. Results also suggest that "stepping strategy" is the dominant strategy for coping with perturbations in frontal plane, perturbations in sagittal plane are to greater extent handled by "ankle strategy" while angular perturbations in transversal plane do not pose substantial challenge for balance. Results also show that specific perturbation in general elicits responses that extend also to other planes of movement that are not directly associated with plane of perturbation as well as to spatio temporal parameters of gait.
Keywords: Balance; Balance assessment robot; Overground walking; Pelvic manipulator; Pelvis perturbations; Rehabilitation robotics.
Figures
Similar articles
-
The comparison of stepping responses following perturbations applied to pelvis during overground and treadmill walking.Technol Health Care. 2017 Aug 9;25(4):781-790. doi: 10.3233/THC-160798. Technol Health Care. 2017. PMID: 28582936
-
Increased use of stepping strategy in response to medio-lateral perturbations in the elderly relates to altered reactive tibialis anterior activity.Gait Posture. 2019 Feb;68:575-582. doi: 10.1016/j.gaitpost.2019.01.010. Epub 2019 Jan 9. Gait Posture. 2019. PMID: 30654320
-
An effective balancing response to lateral perturbations at pelvis level during slow walking requires control in all three planes of motion.J Biomech. 2017 Jul 26;60:79-90. doi: 10.1016/j.jbiomech.2017.06.020. Epub 2017 Jun 21. J Biomech. 2017. PMID: 28669548
-
Review of balance recovery in response to external perturbations during daily activities.Hum Mov Sci. 2020 Feb;69:102546. doi: 10.1016/j.humov.2019.102546. Epub 2019 Dec 31. Hum Mov Sci. 2020. PMID: 31989948 Review.
-
Robot-supported assessment of balance in standing and walking.J Neuroeng Rehabil. 2017 Aug 14;14(1):80. doi: 10.1186/s12984-017-0273-7. J Neuroeng Rehabil. 2017. PMID: 28806995 Free PMC article. Review.
Cited by
-
Cross-step detection using center-of-pressure based algorithm for real-time applications.J Neuroeng Rehabil. 2024 Sep 16;21(1):161. doi: 10.1186/s12984-024-01460-4. J Neuroeng Rehabil. 2024. PMID: 39285381 Free PMC article.
-
Force Analysis and Evaluation of a Pelvic Support Walking Robot with Joint Compliance.J Healthc Eng. 2018 Nov 28;2018:9235023. doi: 10.1155/2018/9235023. eCollection 2018. J Healthc Eng. 2018. PMID: 30622691 Free PMC article.
-
Simulation study on assist-as-needed control of a rehabilitation robotic walker.Technol Health Care. 2023;31(S1):293-302. doi: 10.3233/THC-236025. Technol Health Care. 2023. PMID: 37066930 Free PMC article.
-
Centre of Pressure Estimation during Walking Using Only Inertial-Measurement Units and End-To-End Statistical Modelling.Sensors (Basel). 2020 Oct 28;20(21):6136. doi: 10.3390/s20216136. Sensors (Basel). 2020. PMID: 33126671 Free PMC article.
-
Multidirectional Overground Robotic Training Leads to Improvements in Balance in Older Adults.Robotics (Basel). 2021 Sep;10(3):101. doi: 10.3390/robotics10030101. Epub 2021 Aug 6. Robotics (Basel). 2021. PMID: 35531321 Free PMC article.
References
-
- Winter DA. The Biomechanics and Motor Control of Human Gait: Normal, elderly and Pathological. Waterloo: University of Waterloo Press; 1998.
-
- Classen J, Liepert J, Wise SP, Hallet M. Rapid plasticity of human cortical movement representation induced by practice. J Neurophysiol. 1998;79:1117–23. - PubMed
-
- Schabruna SM, Riddingb MC, Chipchasea LS. An update on brain plasticity for physical therapists. Physiother Pract Res. 2013;34:1–8.
-
- Woollacott MH, Tang PF. Balance control during walking in the older adult: research and its implications. Phys Ther. 1997;77:646–60. - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
