

Optimal visuotactile integration for velocity discrimination of self-hand movements
- PMID: 27385802
- PMCID: PMC5040371
- DOI: 10.1152/jn.00883.2015
Optimal visuotactile integration for velocity discrimination of self-hand movements
Abstract
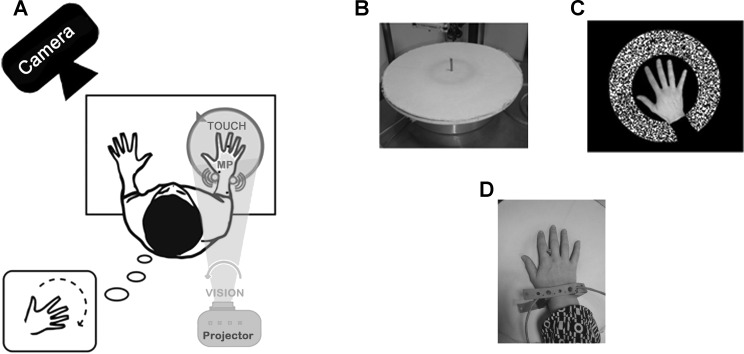
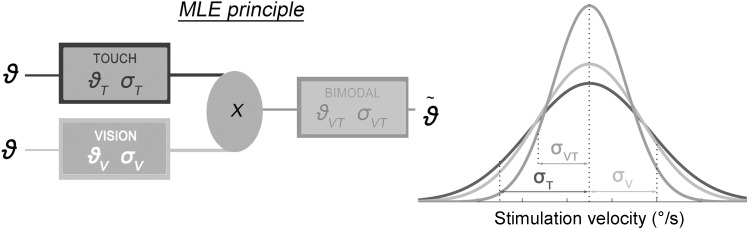
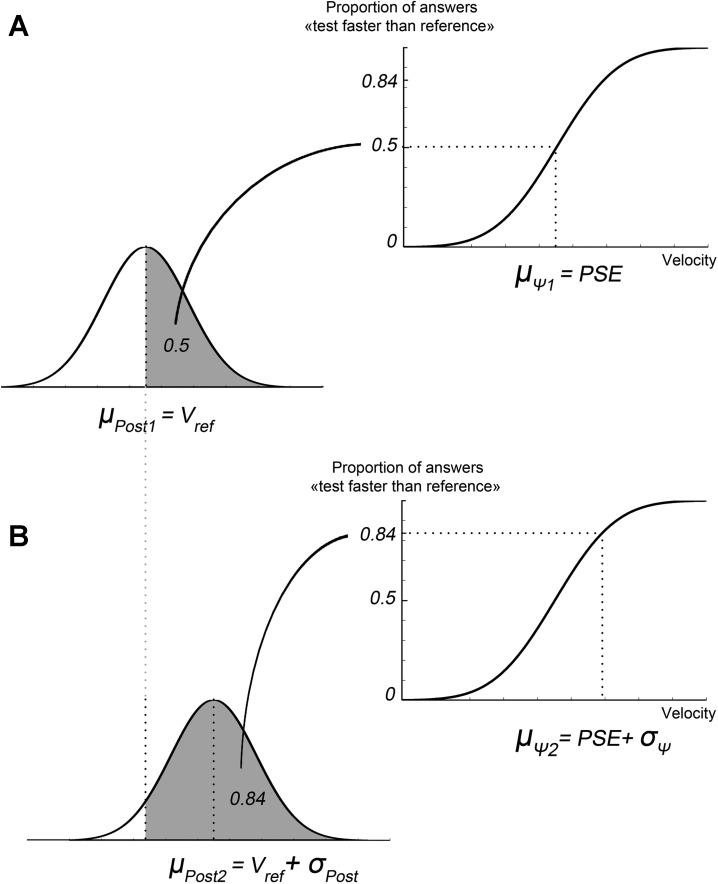
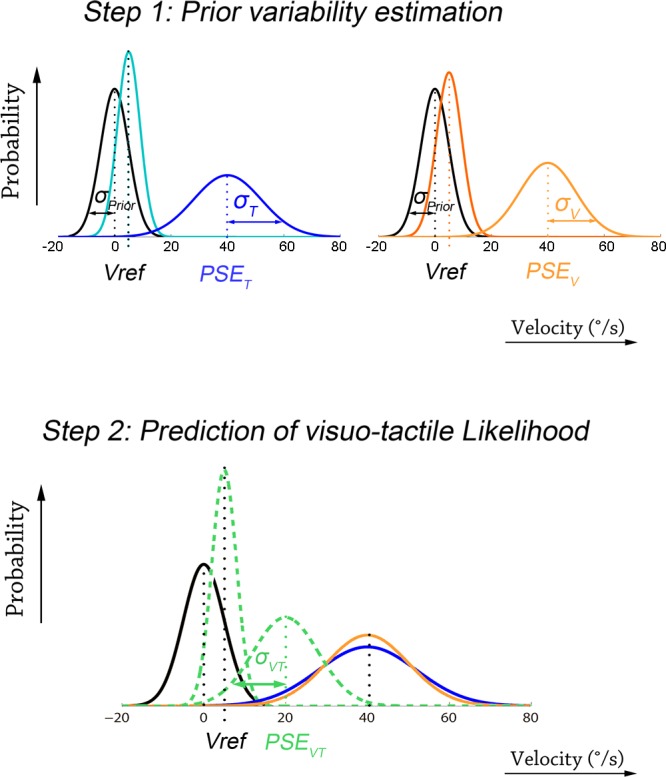
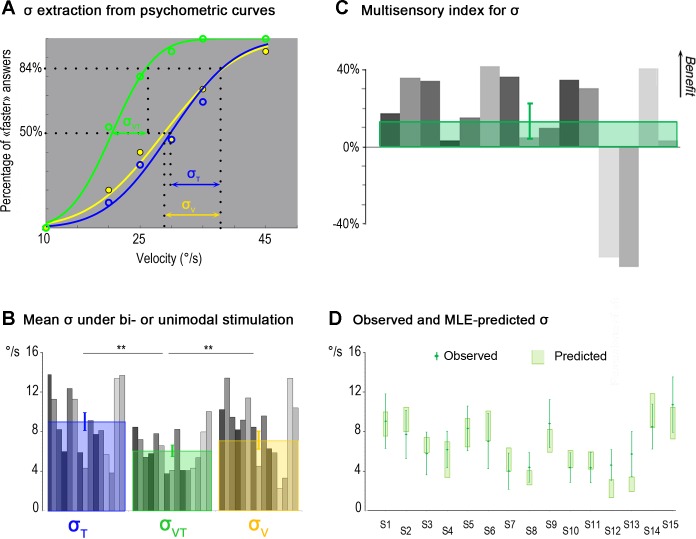
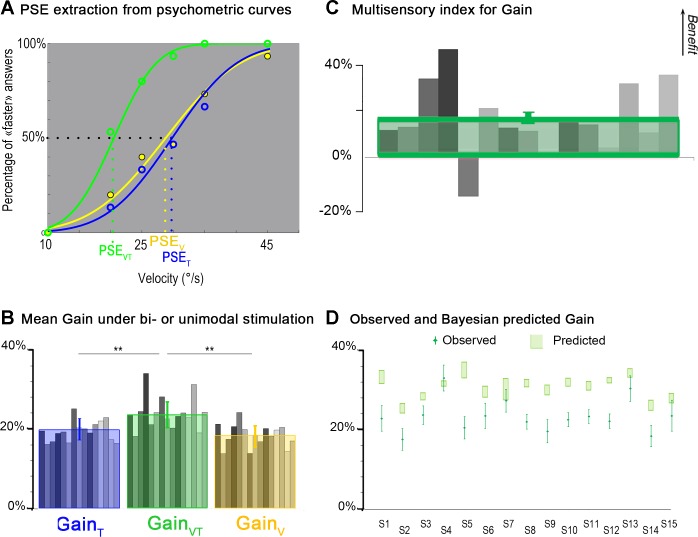
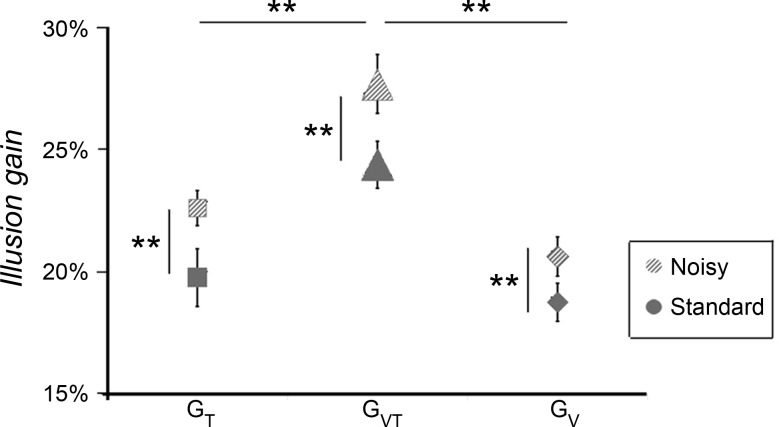
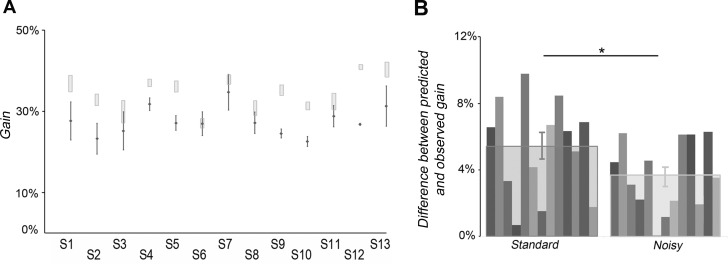
Illusory hand movements can be elicited by a textured disk or a visual pattern rotating under one's hand, while proprioceptive inputs convey immobility information (Blanchard C, Roll R, Roll JP, Kavounoudias A. PLoS One 8: e62475, 2013). Here, we investigated whether visuotactile integration can optimize velocity discrimination of illusory hand movements in line with Bayesian predictions. We induced illusory movements in 15 volunteers by visual and/or tactile stimulation delivered at six angular velocities. Participants had to compare hand illusion velocities with a 5°/s hand reference movement in an alternative forced choice paradigm. Results showed that the discrimination threshold decreased in the visuotactile condition compared with unimodal (visual or tactile) conditions, reflecting better bimodal discrimination. The perceptual strength (gain) of the illusions also increased: the stimulation required to give rise to a 5°/s illusory movement was slower in the visuotactile condition compared with each of the two unimodal conditions. The maximum likelihood estimation model satisfactorily predicted the improved discrimination threshold but not the increase in gain. When we added a zero-centered prior, reflecting immobility information, the Bayesian model did actually predict the gain increase but systematically overestimated it. Interestingly, the predicted gains better fit the visuotactile performances when a proprioceptive noise was generated by covibrating antagonist wrist muscles. These findings show that kinesthetic information of visual and tactile origins is optimally integrated to improve velocity discrimination of self-hand movements. However, a Bayesian model alone could not fully describe the illusory phenomenon pointing to the crucial importance of the omnipresent muscle proprioceptive cues with respect to other sensory cues for kinesthesia.
Keywords: Bayesian modeling; illusions; kinesthesia; multisensory integration; muscle proprioception.
Copyright © 2016 the American Physiological Society.
Figures
Similar articles
-
Combined contribution of tactile and proprioceptive feedback to hand movement perception.Brain Res. 2011 Mar 25;1382:219-29. doi: 10.1016/j.brainres.2011.01.066. Epub 2011 Jan 26. Brain Res. 2011. PMID: 21276776
-
Differential contributions of vision, touch and muscle proprioception to the coding of hand movements.PLoS One. 2013 Apr 23;8(4):e62475. doi: 10.1371/journal.pone.0062475. Print 2013. PLoS One. 2013. PMID: 23626826 Free PMC article.
-
Hand movement illusions show changes in sensory reliance and preservation of multisensory integration with age for kinaesthesia.Neuropsychologia. 2018 Oct;119:45-58. doi: 10.1016/j.neuropsychologia.2018.07.027. Epub 2018 Jul 29. Neuropsychologia. 2018. PMID: 30063911
-
The moving rubber hand illusion revisited: comparing movements and visuotactile stimulation to induce illusory ownership.Conscious Cogn. 2014 May;26:117-32. doi: 10.1016/j.concog.2014.02.003. Epub 2014 Apr 2. Conscious Cogn. 2014. PMID: 24705182
-
Age-Related Impairment of Hand Movement Perception Based on Muscle Proprioception and Touch.Neuroscience. 2018 Jun 15;381:91-104. doi: 10.1016/j.neuroscience.2018.04.015. Epub 2018 Apr 22. Neuroscience. 2018. PMID: 29684506
Cited by
-
Sustained rubber hand illusion after the end of visuotactile stimulation with a similar time course for the reduction of subjective ownership and proprioceptive drift.Exp Brain Res. 2021 Dec;239(12):3471-3486. doi: 10.1007/s00221-021-06211-8. Epub 2021 Sep 15. Exp Brain Res. 2021. PMID: 34524490 Free PMC article.
-
Uncertainty-based inference of a common cause for body ownership.Elife. 2022 Sep 27;11:e77221. doi: 10.7554/eLife.77221. Elife. 2022. PMID: 36165441 Free PMC article.
-
Kinesthesia and Temporal Experience: On the 'Knitting and Unknitting' Process of Bodily Subjectivity in Schizophrenia.Diagnostics (Basel). 2022 Nov 7;12(11):2720. doi: 10.3390/diagnostics12112720. Diagnostics (Basel). 2022. PMID: 36359562 Free PMC article. Review.
-
Seeing Your Foot Move Changes Muscle Proprioceptive Feedback.eNeuro. 2019 Mar 22;6(2):ENEURO.0341-18.2019. doi: 10.1523/ENEURO.0341-18.2019. eCollection 2019 Mar-Apr. eNeuro. 2019. PMID: 30923738 Free PMC article.
-
Visuotactile integration in individuals with fibromyalgia.Front Hum Neurosci. 2024 May 17;18:1390609. doi: 10.3389/fnhum.2024.1390609. eCollection 2024. Front Hum Neurosci. 2024. PMID: 38826615 Free PMC article.
References
-
- Adams WJ, Banks MS, van Ee R. Adaptation to three-dimensional distortions in human vision. Nat Neurosci 4: 1063–1064, 2001. - PubMed
-
- Alais D, Burr D. The ventriloquist effect results from near-optimal bimodal integration. Curr Biol 14: 257–262, 2004. - PubMed
-
- Blanchard C, Roll R, Roll JP, Kavounoudias A. Combined contribution of tactile and proprioceptive feedback to hand movement perception. Brain Res 1382: 219–229, 2011. - PubMed
LinkOut - more resources
Full Text Sources
Other Literature Sources