

Phototactic guidance of a tissue-engineered soft-robotic ray
- PMID: 27387948
- PMCID: PMC5526330
- DOI: 10.1126/science.aaf4292
Phototactic guidance of a tissue-engineered soft-robotic ray
Abstract
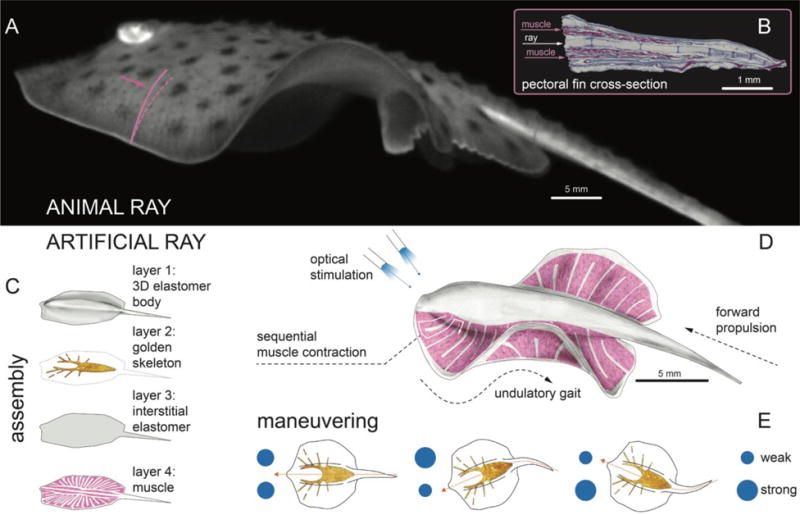
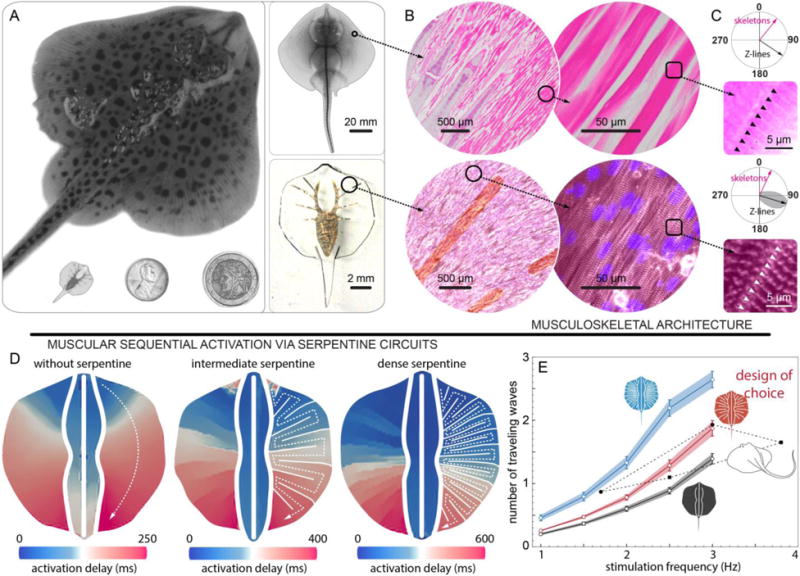
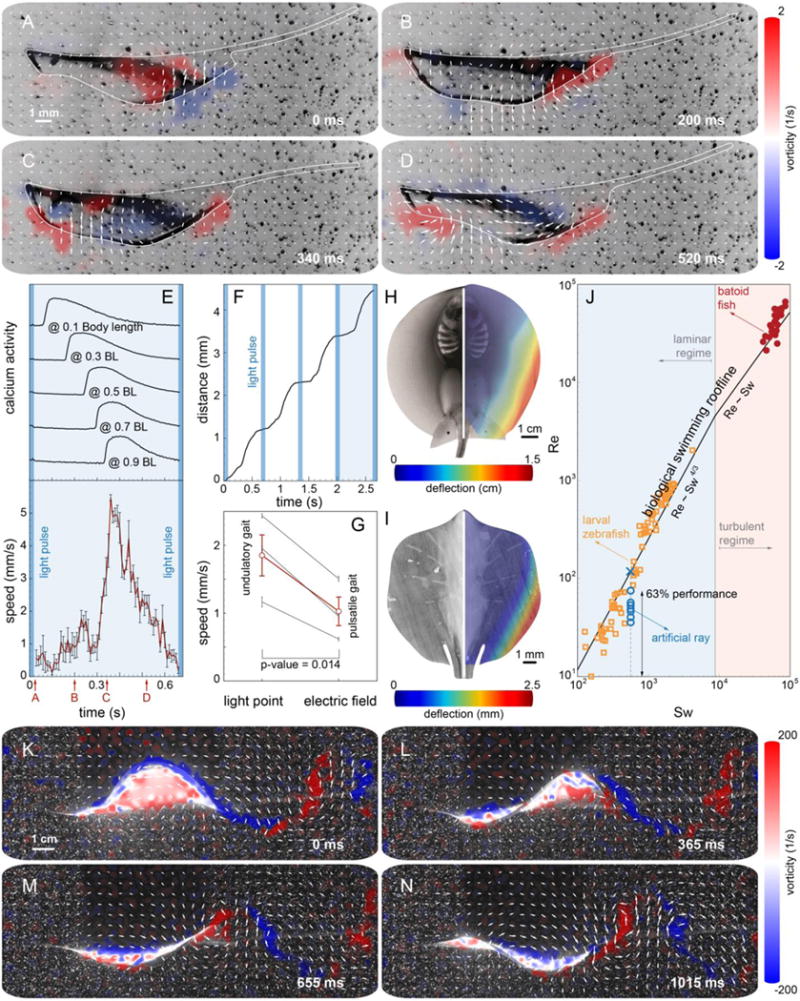
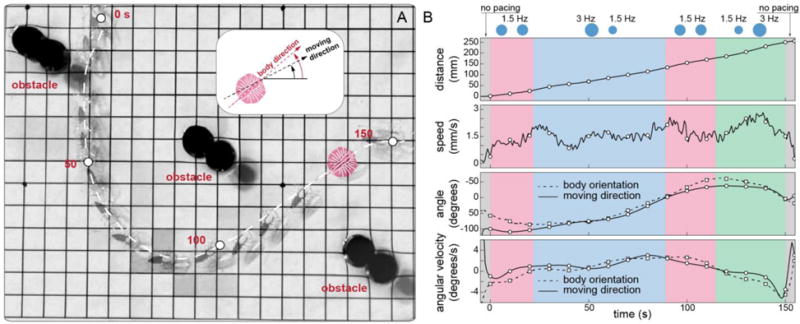
Inspired by the relatively simple morphological blueprint provided by batoid fish such as stingrays and skates, we created a biohybrid system that enables an artificial animal--a tissue-engineered ray--to swim and phototactically follow a light cue. By patterning dissociated rat cardiomyocytes on an elastomeric body enclosing a microfabricated gold skeleton, we replicated fish morphology at 1/10 scale and captured basic fin deflection patterns of batoid fish. Optogenetics allows for phototactic guidance, steering, and turning maneuvers. Optical stimulation induced sequential muscle activation via serpentine-patterned muscle circuits, leading to coordinated undulatory swimming. The speed and direction of the ray was controlled by modulating light frequency and by independently eliciting right and left fins, allowing the biohybrid machine to maneuver through an obstacle course.
Copyright © 2016, American Association for the Advancement of Science.
Figures
Comment in
-
ROBOTICS. Heartmaker's next step: a ray 'biohybrid'.Science. 2016 Jul 8;353(6295):110-1. doi: 10.1126/science.353.6295.110. Science. 2016. PMID: 27387932 No abstract available.
-
Alighting on soft robot rays.Nat Biotechnol. 2016 Sep 8;34(9):932. doi: 10.1038/nbt.3672. Nat Biotechnol. 2016. PMID: 27606460 No abstract available.
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
