

Optical Enhancement of Exoskeleton-Based Estimation of Glenohumeral Angles
- PMID: 27403044
- PMCID: PMC4925951
- DOI: 10.1155/2016/5058171
Optical Enhancement of Exoskeleton-Based Estimation of Glenohumeral Angles
Abstract
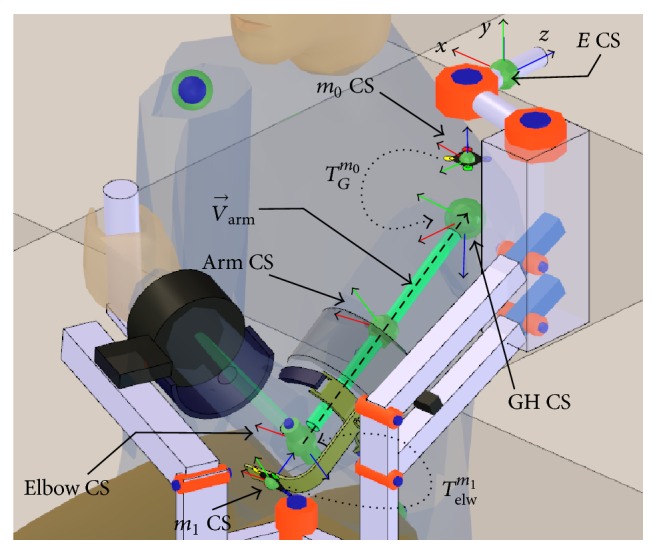
In Robot-Assisted Rehabilitation (RAR) the accurate estimation of the patient limb joint angles is critical for assessing therapy efficacy. In RAR, the use of classic motion capture systems (MOCAPs) (e.g., optical and electromagnetic) to estimate the Glenohumeral (GH) joint angles is hindered by the exoskeleton body, which causes occlusions and magnetic disturbances. Moreover, the exoskeleton posture does not accurately reflect limb posture, as their kinematic models differ. To address the said limitations in posture estimation, we propose installing the cameras of an optical marker-based MOCAP in the rehabilitation exoskeleton. Then, the GH joint angles are estimated by combining the estimated marker poses and exoskeleton Forward Kinematics. Such hybrid system prevents problems related to marker occlusions, reduced camera detection volume, and imprecise joint angle estimation due to the kinematic mismatch of the patient and exoskeleton models. This paper presents the formulation, simulation, and accuracy quantification of the proposed method with simulated human movements. In addition, a sensitivity analysis of the method accuracy to marker position estimation errors, due to system calibration errors and marker drifts, has been carried out. The results show that, even with significant errors in the marker position estimation, method accuracy is adequate for RAR.
Figures
















Similar articles
-
Inverse Kinematics for Upper Limb Compound Movement Estimation in Exoskeleton-Assisted Rehabilitation.Biomed Res Int. 2016;2016:2581924. doi: 10.1155/2016/2581924. Epub 2016 Jun 15. Biomed Res Int. 2016. PMID: 27403420 Free PMC article.
-
Upper limb posture estimation in robotic and virtual reality-based rehabilitation.Biomed Res Int. 2014;2014:821908. doi: 10.1155/2014/821908. Epub 2014 Jul 8. Biomed Res Int. 2014. PMID: 25110698 Free PMC article.
-
Real-Time Estimation of Glenohumeral Joint Rotation Center With Cable-Driven Arm Exoskeleton (CAREX)-A Cable-Based Arm Exoskeleton.J Mech Robot. 2014 Feb;6(1):0145021-145025. doi: 10.1115/1.4025926. Epub 2013 Dec 27. J Mech Robot. 2014. PMID: 24895530 Free PMC article.
-
Joint angle estimation during shoulder abduction exercise using contactless technology.Biomed Eng Online. 2024 Jan 28;23(1):11. doi: 10.1186/s12938-024-01203-5. Biomed Eng Online. 2024. PMID: 38281988 Free PMC article.
-
The Potential of Computer Vision-Based Marker-Less Human Motion Analysis for Rehabilitation.Rehabil Process Outcome. 2021 Jul 5;10:11795727211022330. doi: 10.1177/11795727211022330. eCollection 2021. Rehabil Process Outcome. 2021. PMID: 34987303 Free PMC article. Review.
Cited by
-
Advancements in Sensor Technologies and Control Strategies for Lower-Limb Rehabilitation Exoskeletons: A Comprehensive Review.Micromachines (Basel). 2024 Apr 2;15(4):489. doi: 10.3390/mi15040489. Micromachines (Basel). 2024. PMID: 38675301 Free PMC article. Review.
-
Analysis of the posture pattern during robotic simulator tasks using an optical motion capture system.Surg Endosc. 2018 Jan;32(1):183-190. doi: 10.1007/s00464-017-5655-1. Epub 2017 Jun 29. Surg Endosc. 2018. PMID: 28664432
References
-
- Gilliaux M., Lejeune T., Detrembleur C., Sapin J., Dehez B., Stoquart G. A robotic device as a sensitive quantitative tool to assess upper limb impairments in stroke patients: a preliminary prospective cohort study. Journal of Rehabilitation Medicine. 2012;44(3):210–217. doi: 10.2340/16501977-0926. - DOI - PubMed
-
- Zhou H., Hu H. Human motion tracking for rehabilitation-a survey. Biomedical Signal Processing and Control. 2008;3(1):1–18. doi: 10.1016/j.bspc.2007.09.001. - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
