

Dynamical systems, attractors, and neural circuits
- PMID: 27408709
- PMCID: PMC4930057
- DOI: 10.12688/f1000research.7698.1
Dynamical systems, attractors, and neural circuits
Abstract
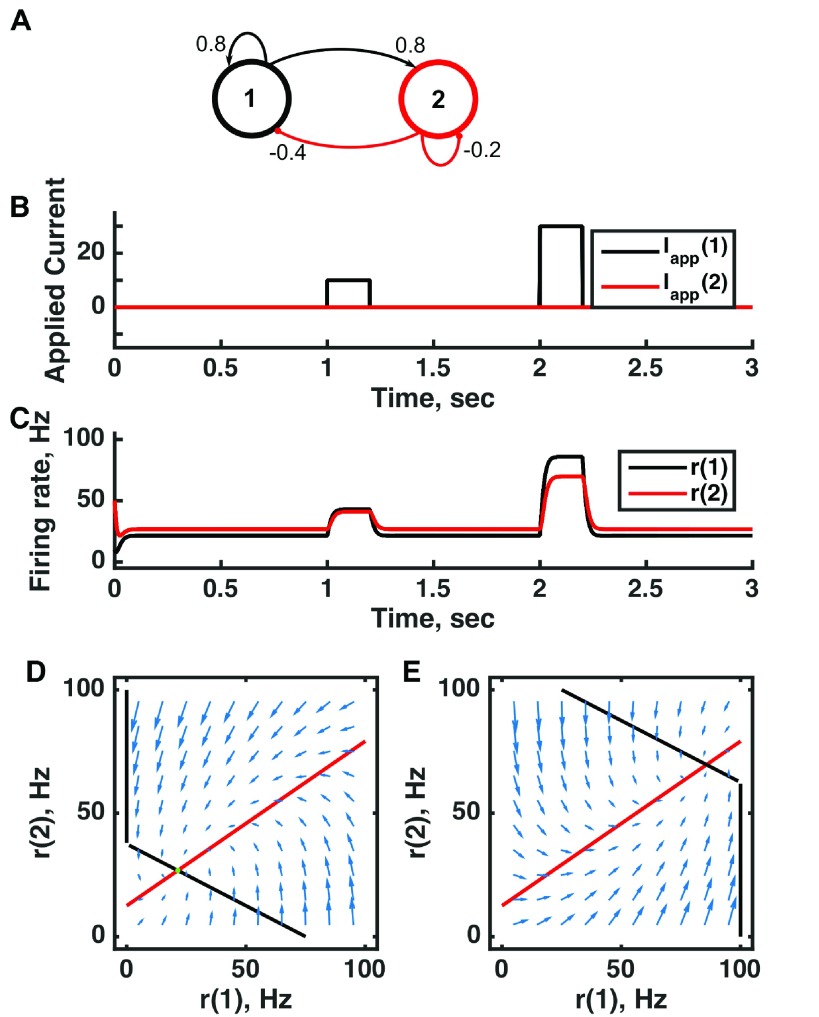
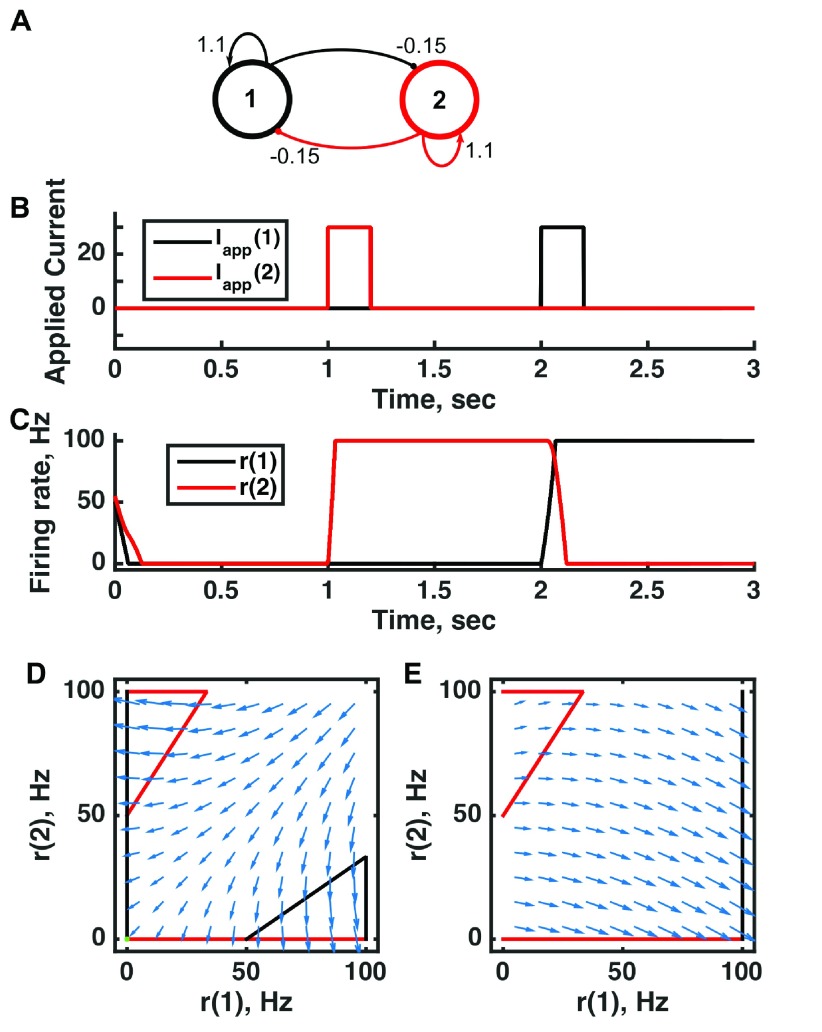
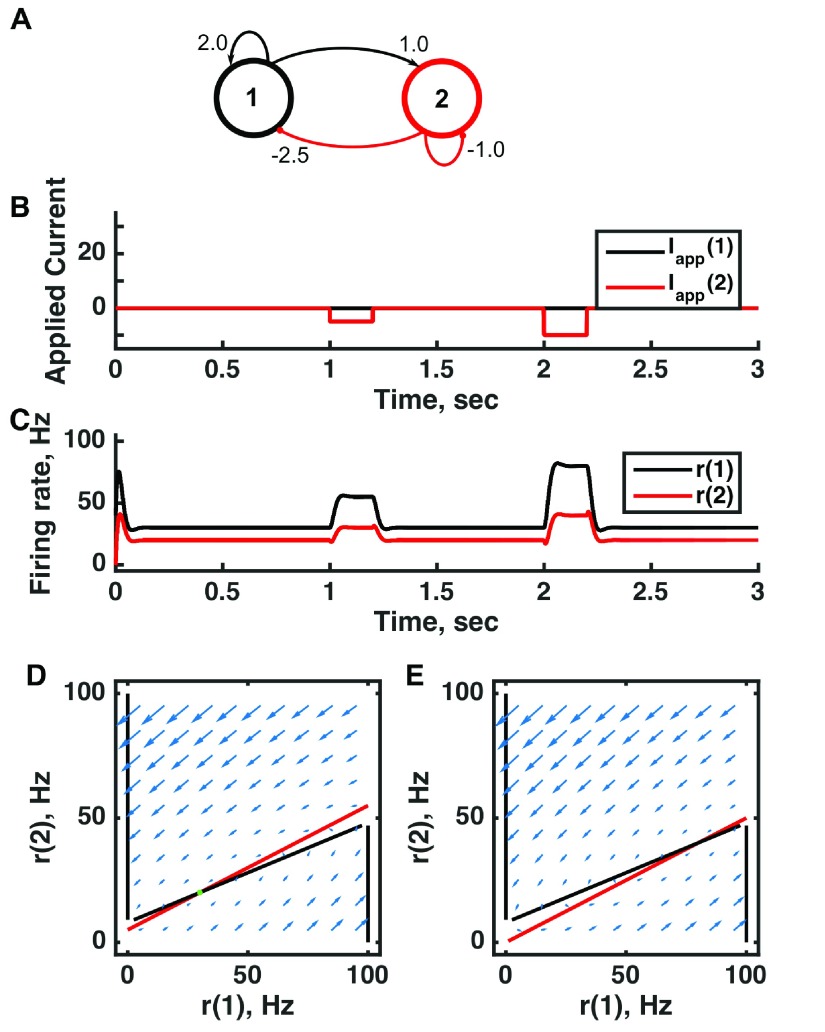
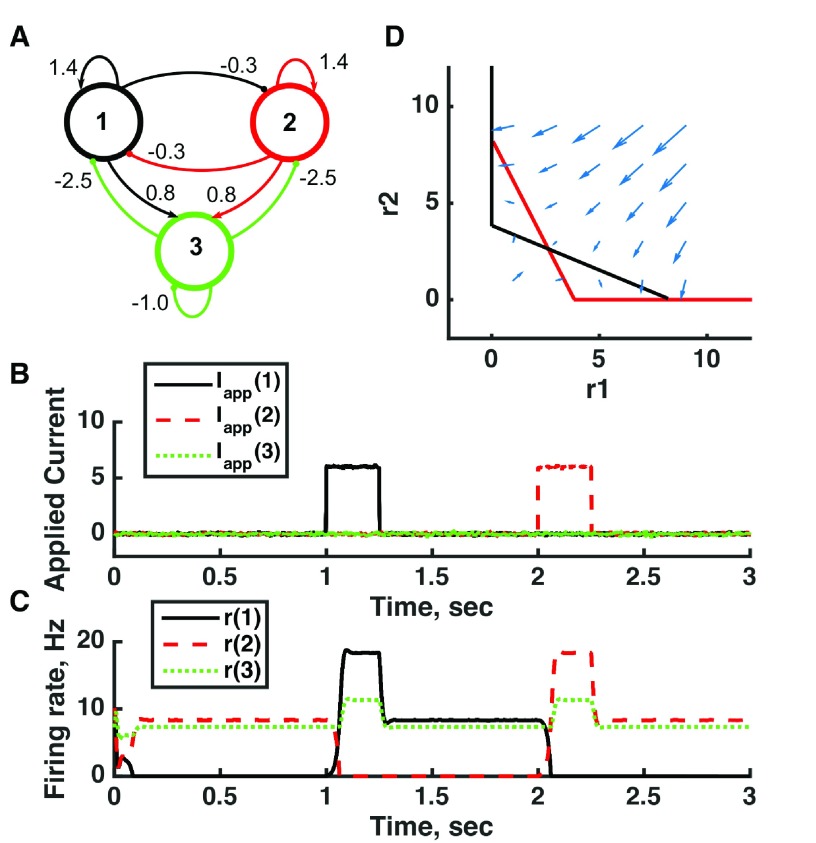
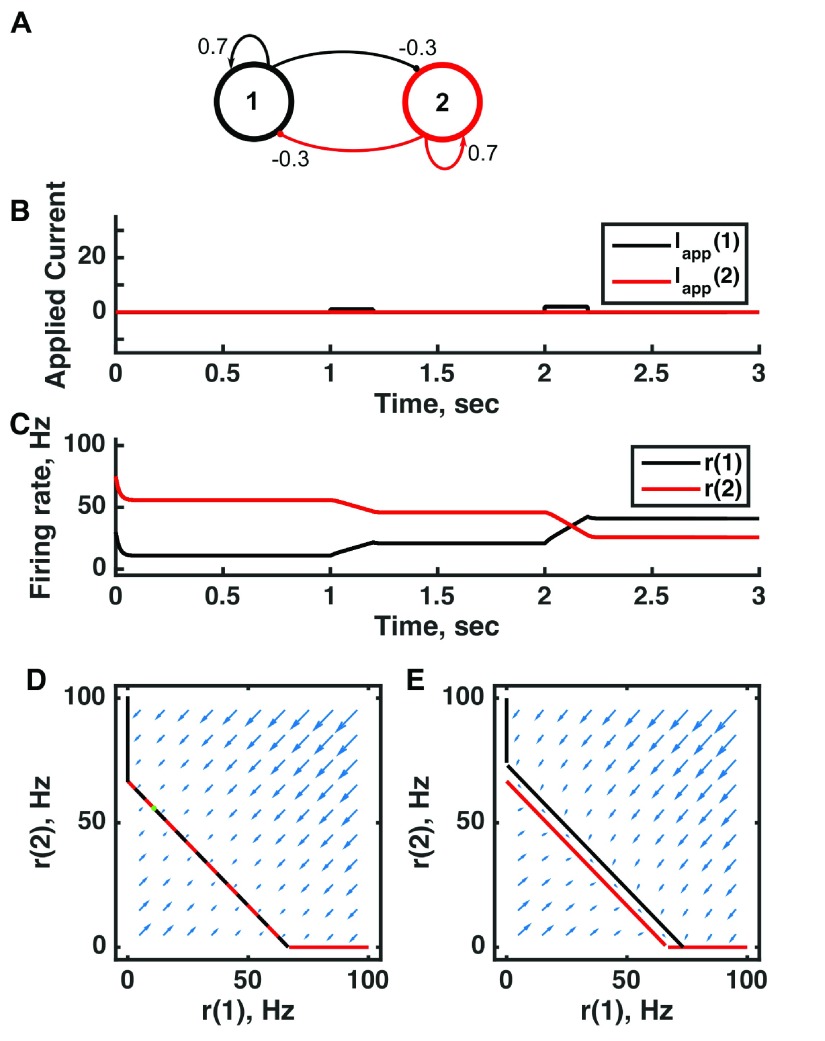
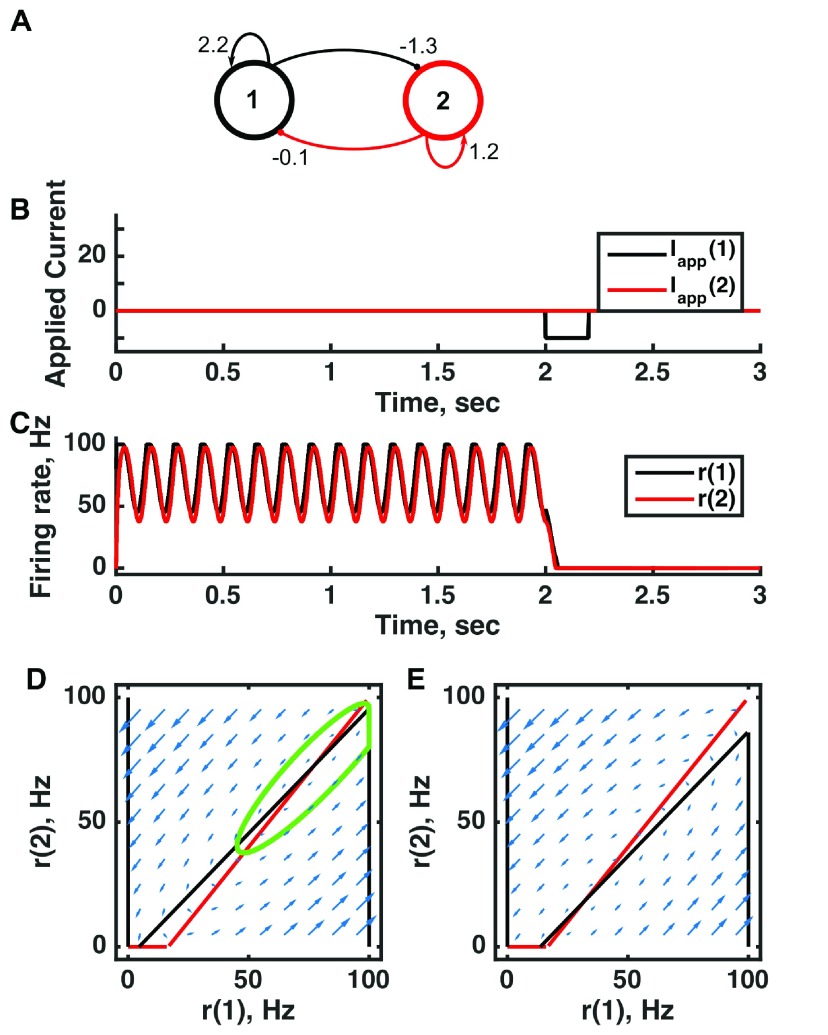
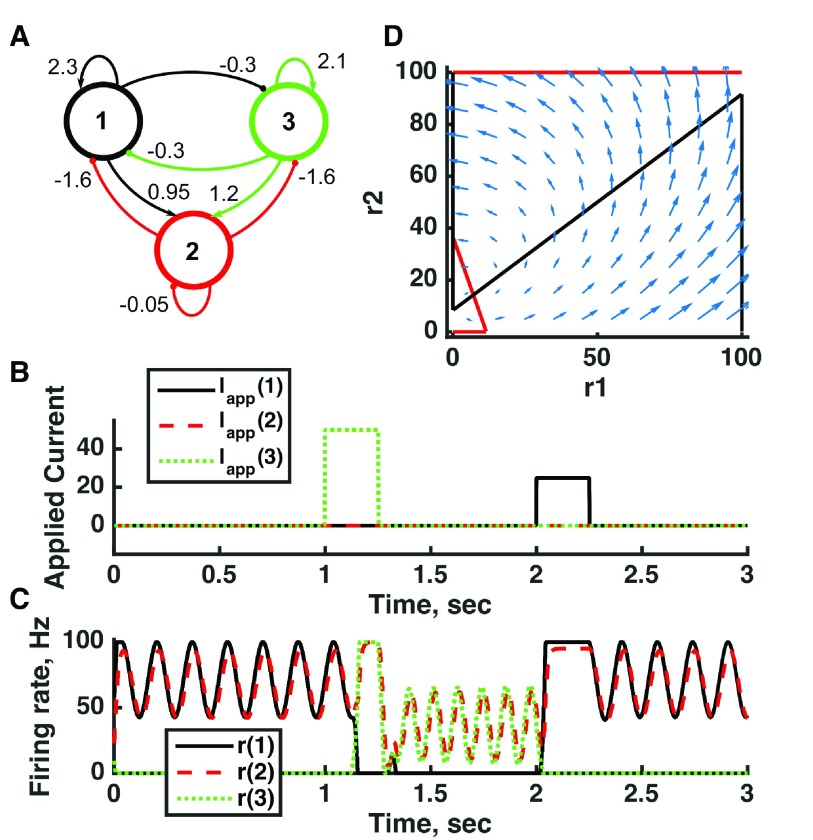
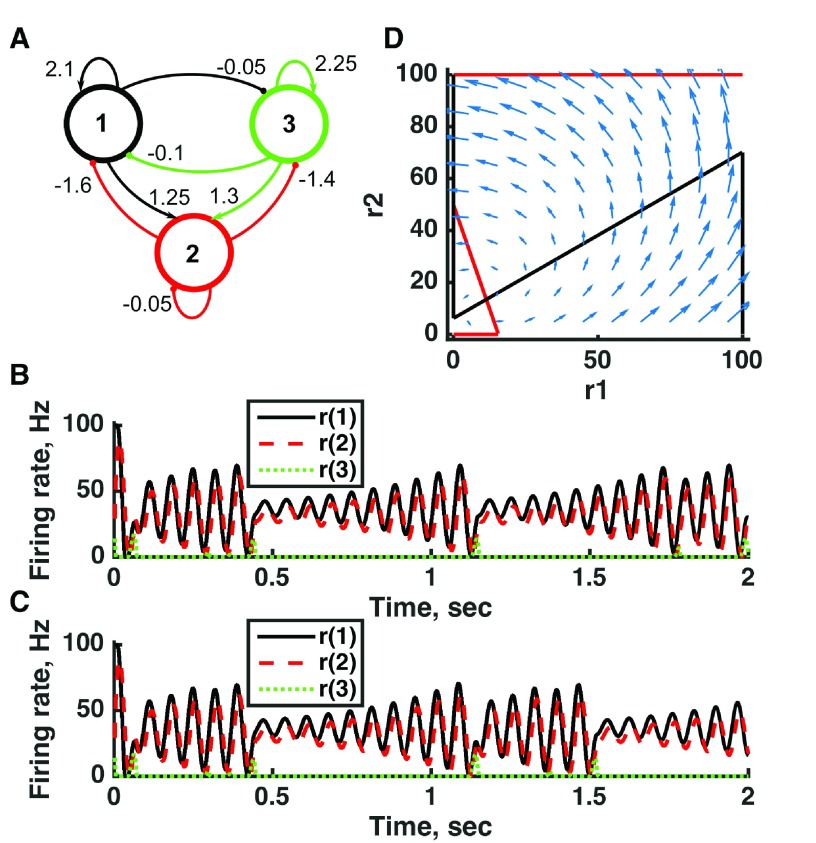
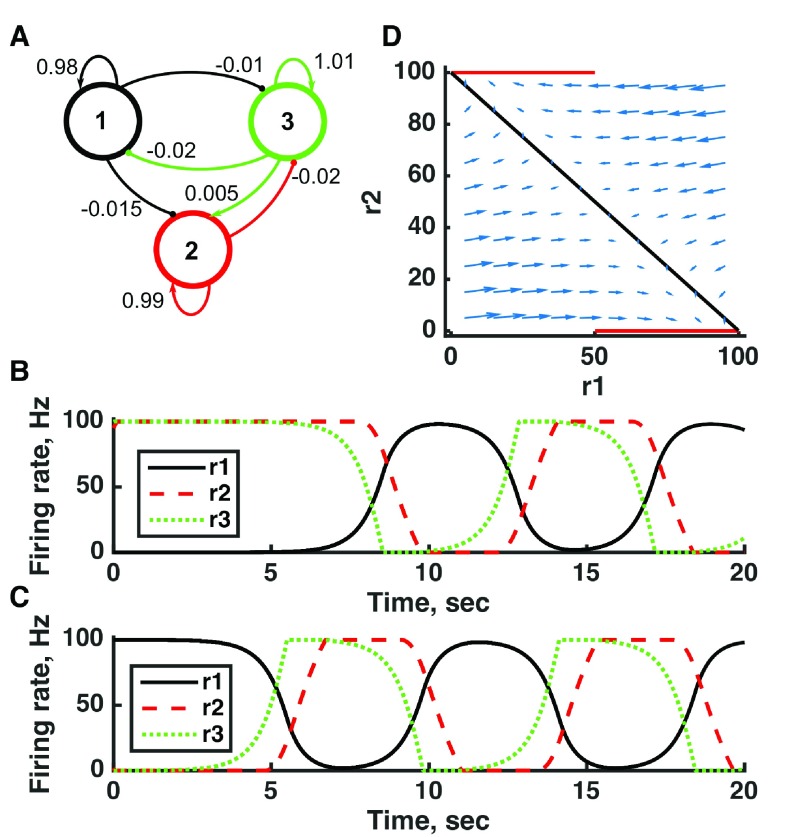
Biology is the study of dynamical systems. Yet most of us working in biology have limited pedagogical training in the theory of dynamical systems, an unfortunate historical fact that can be remedied for future generations of life scientists. In my particular field of systems neuroscience, neural circuits are rife with nonlinearities at all levels of description, rendering simple methodologies and our own intuition unreliable. Therefore, our ideas are likely to be wrong unless informed by good models. These models should be based on the mathematical theories of dynamical systems since functioning neurons are dynamic-they change their membrane potential and firing rates with time. Thus, selecting the appropriate type of dynamical system upon which to base a model is an important first step in the modeling process. This step all too easily goes awry, in part because there are many frameworks to choose from, in part because the sparsely sampled data can be consistent with a variety of dynamical processes, and in part because each modeler has a preferred modeling approach that is difficult to move away from. This brief review summarizes some of the main dynamical paradigms that can arise in neural circuits, with comments on what they can achieve computationally and what signatures might reveal their presence within empirical data. I provide examples of different dynamical systems using simple circuits of two or three cells, emphasizing that any one connectivity pattern is compatible with multiple, diverse functions.
Keywords: Heteroclinics; Marginal states; Oscillating systems; Point attractors; continuous attractors; cyclic attractors; hidden Markov model; limit cycles; line attractors; strange attractors.
Conflict of interest statement
No competing interests were disclosed.
Figures
References
-
- Strogatz SH: Nonlinear Dynamics and Chaos.Boulder, CO: Westview Press,2015. Reference Source
-
- Dayan P, Abbott LF: Theoretical Neuroscience. MIT Press,2001. Reference Source
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources