

Partial squeeze film levitation modulates fingertip friction
- PMID: 27482117
- PMCID: PMC4995990
- DOI: 10.1073/pnas.1603908113
Partial squeeze film levitation modulates fingertip friction
Abstract
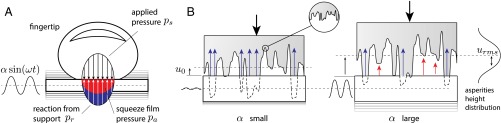
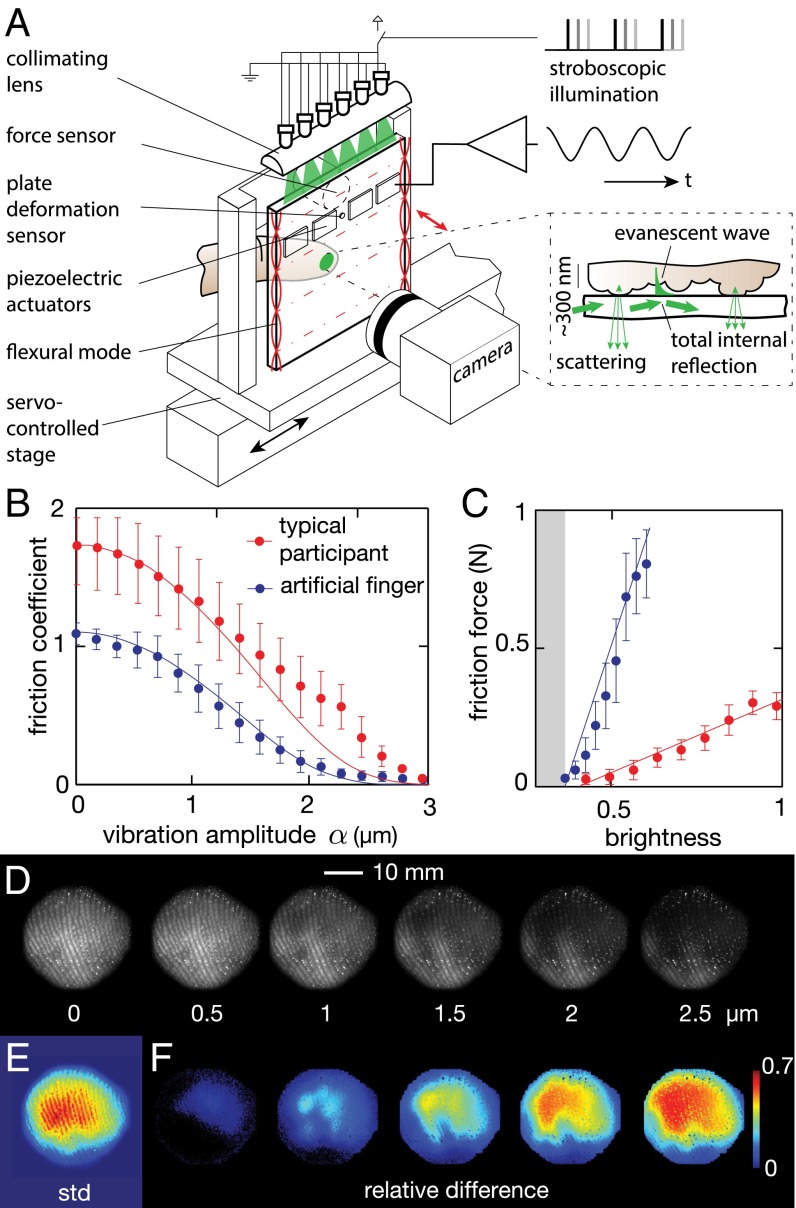
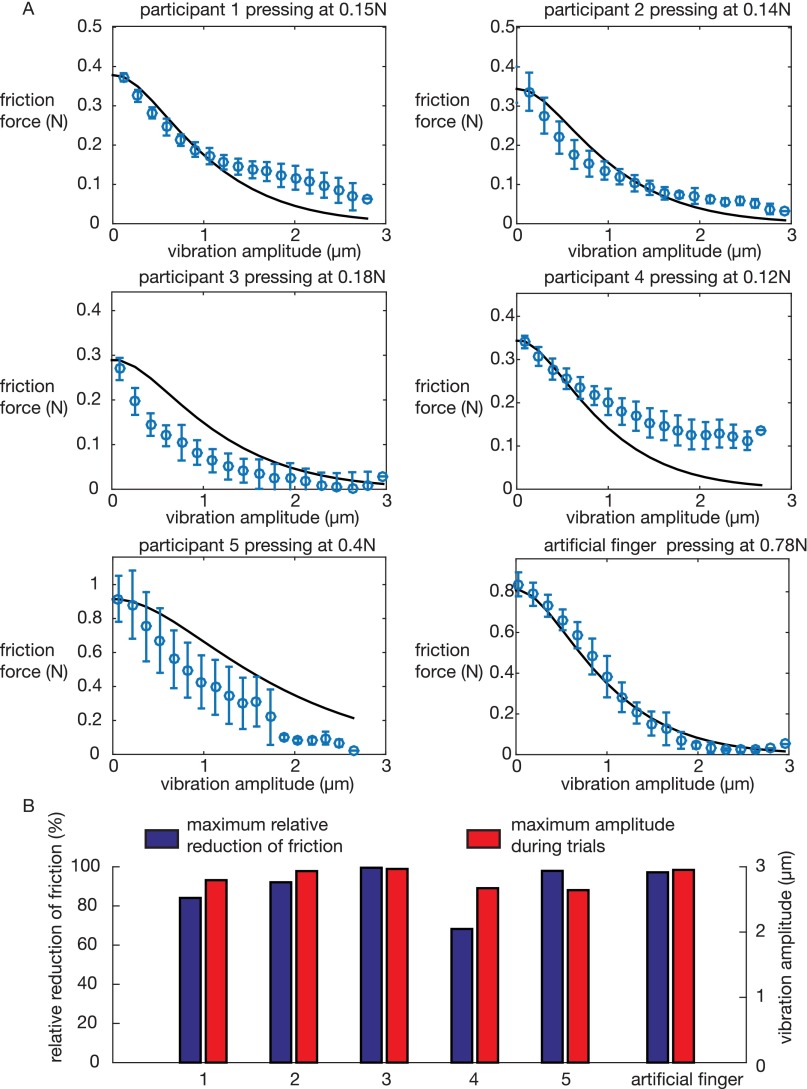
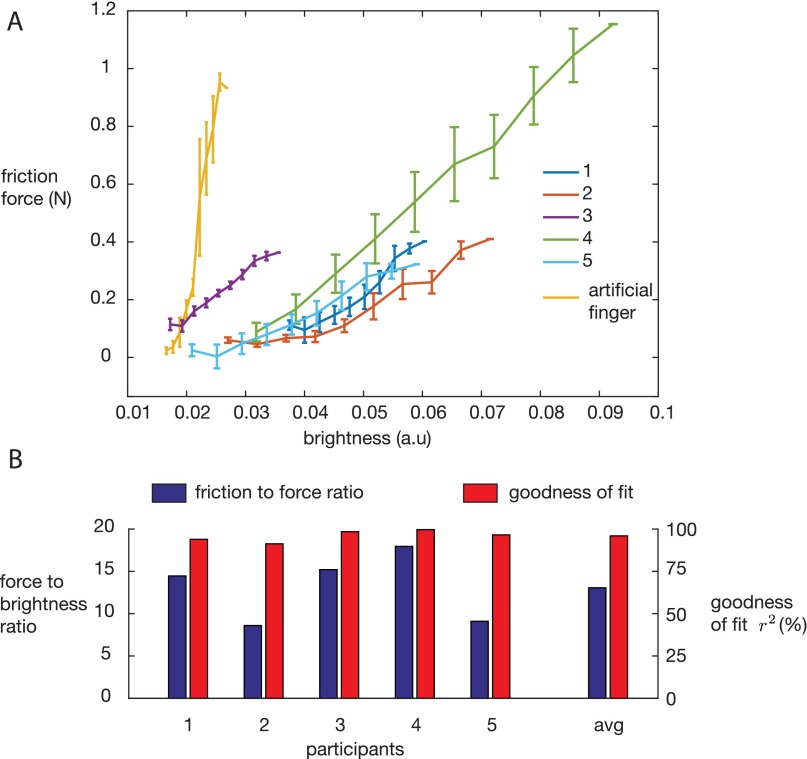
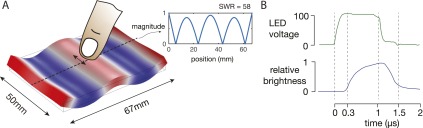
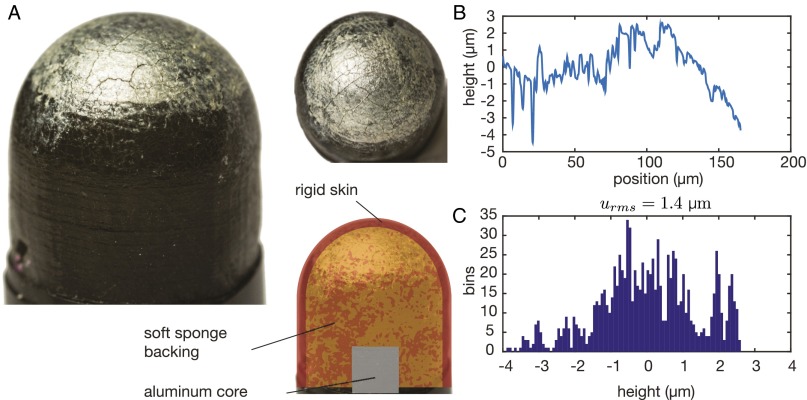
When touched, a glass plate excited with ultrasonic transverse waves feels notably more slippery than it does at rest. To study this phenomenon, we use frustrated total internal reflection to image the asperities of the skin that are in intimate contact with a glass plate. We observed that the load at the interface is shared between the elastic compression of the asperities of the skin and a squeeze film of air. Stroboscopic investigation reveals that the time evolution of the interfacial gap is partially out of phase with the plate vibration. Taken together, these results suggest that the skin bounces against the vibrating plate but that the bounces are cushioned by a squeeze film of air that does not have time to escape the interfacial separation. This behavior results in dynamic levitation, in which the average number of asperities in intimate contact is reduced, thereby reducing friction. This improved understanding of the physics of friction reduction provides key guidelines for designing interfaces that can dynamically modulate friction with soft materials and biological tissues, such as human fingertips.
Keywords: acoustic; biotribology; haptics; roughness; squeeze film.
Conflict of interest statement
J.E.C. is a founder of Tanvas, Inc., which holds license to variable friction technology.
Figures
References
-
- Cadoret G, Smith AM. Friction, not texture, dictates grip forces used during object manipulation. J Neurophysiol. 1996;75(5):1963–1969. - PubMed
-
- Smith AM, et al. Roughness of simulated surfaces examined with a haptic tool: Effects of spatial period, friction, and resistance amplitude. Exp Brain Res. 2010;202(1):33–43. - PubMed
-
- Wiertlewski M, Lozada J, Hayward V. The spatial spectrum of tangential skin displacement can encode tactual texture. IEEE Trans Robot. 2011;27(3):461–472.
-
- Johansson RS, Westling G. Roles of glabrous skin receptors and sensorimotor memory in automatic control of precision grip when lifting rougher or more slippery objects. Exp Brain Res. 1984;56(3):550–564. - PubMed
-
- Westling G, Johansson RS. Responses in glabrous skin mechanoreceptors during precision grip in humans. Exp Brain Res. 1987;66(1):128–140. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
