

Combining Vibrotactile Feedback with Volitional Myoelectric Control for Robotic Transtibial Prostheses
- PMID: 27597824
- PMCID: PMC4993021
- DOI: 10.3389/fnbot.2016.00008
Combining Vibrotactile Feedback with Volitional Myoelectric Control for Robotic Transtibial Prostheses
Abstract
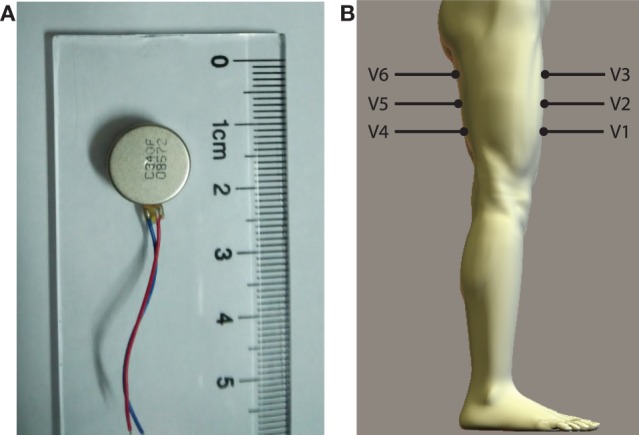
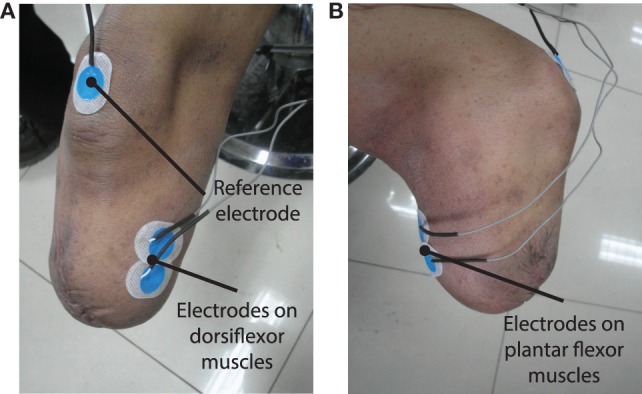
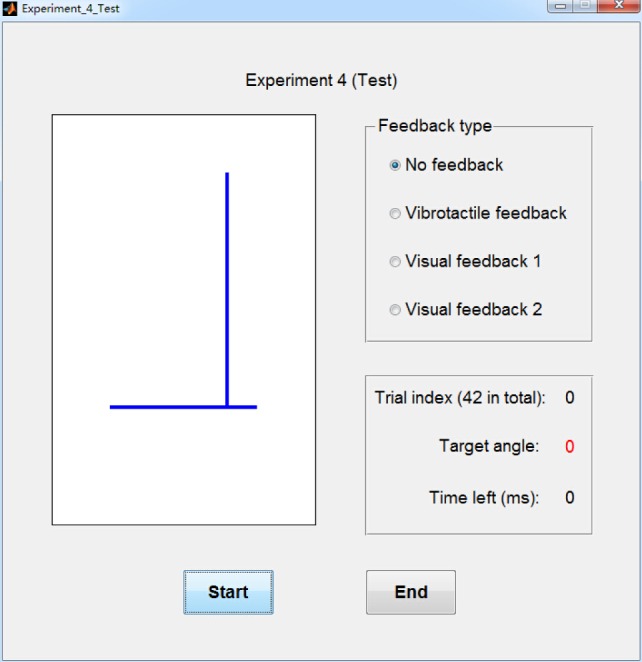
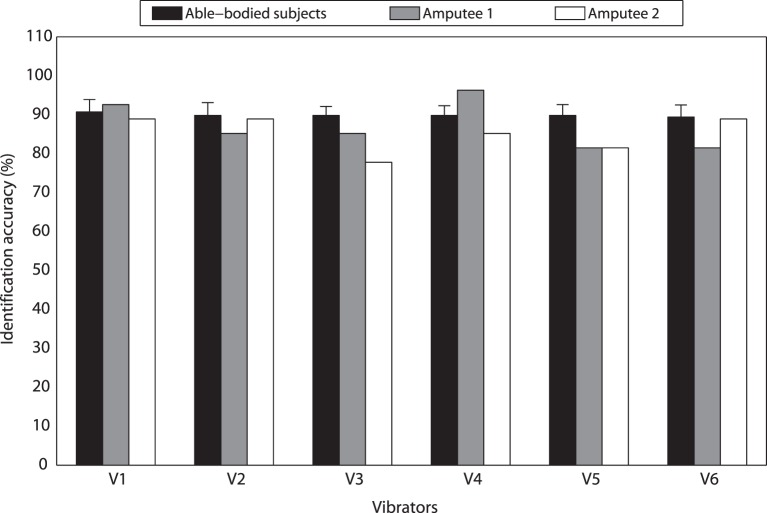
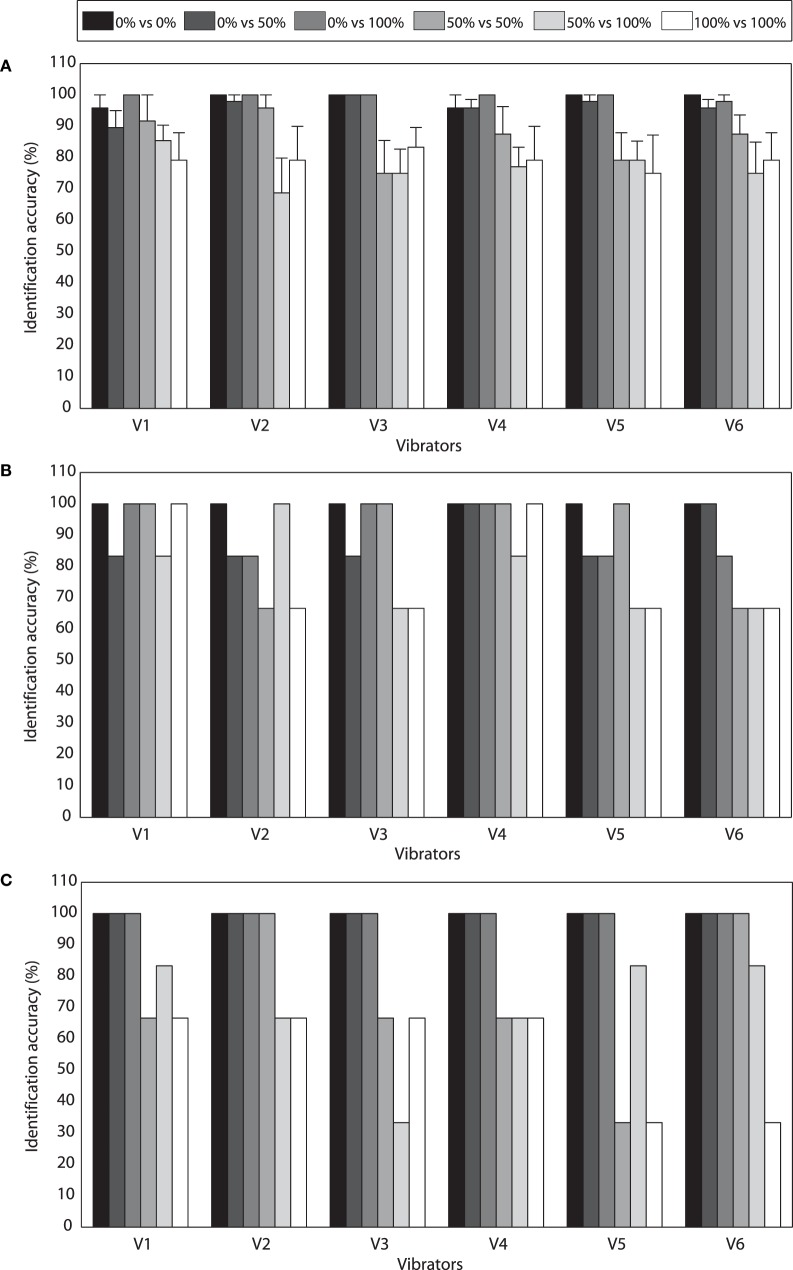
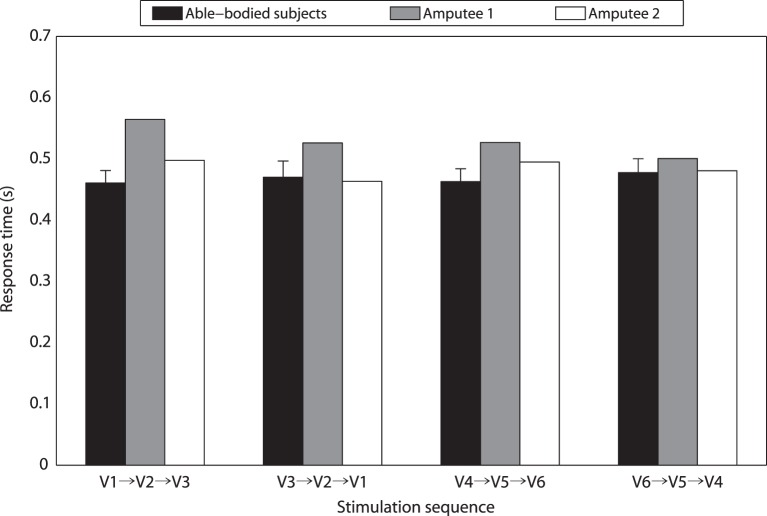
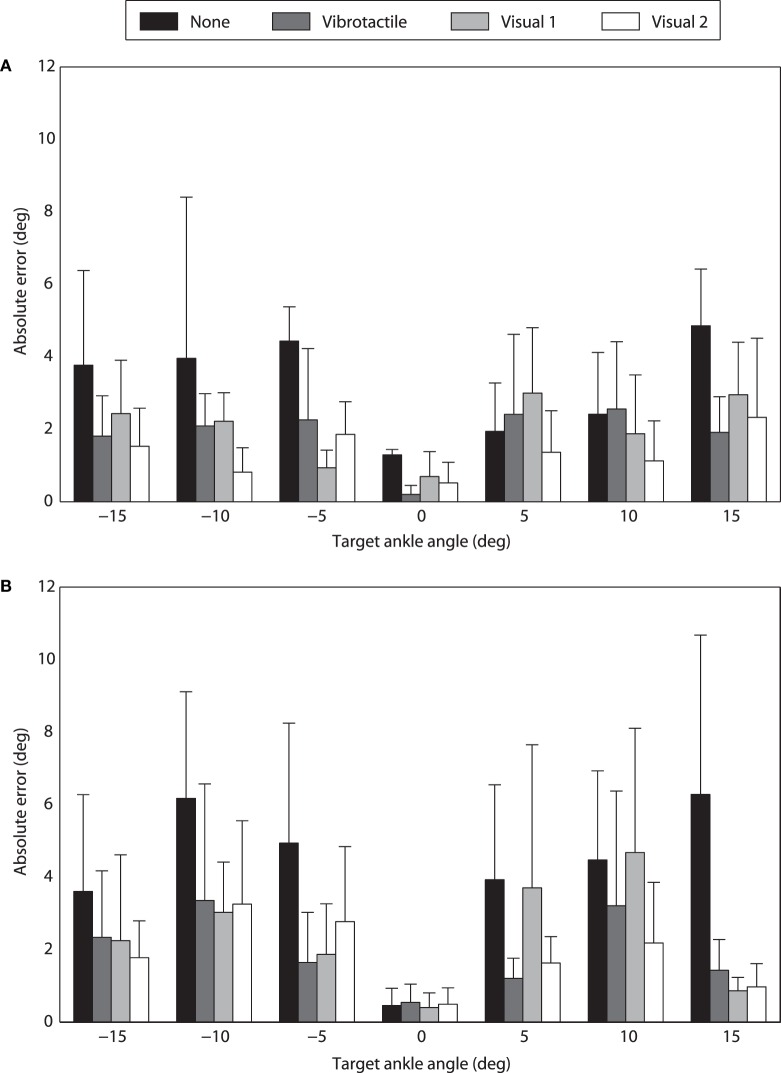
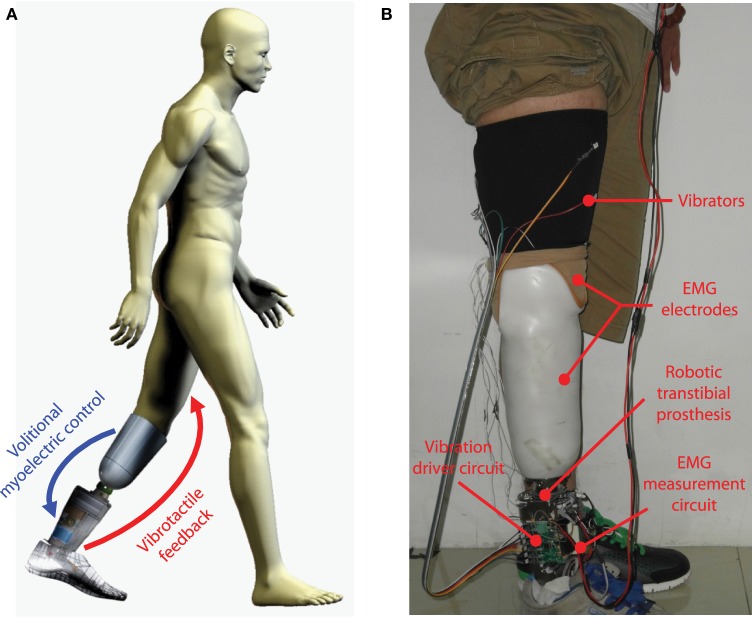
In recent years, the development of myoelectric control for robotic lower-limb prostheses makes it possible for amputee users to volitionally control prosthetic joints. However, the human-centered control loop is not closed due to the lack of sufficient feedback of prosthetic joint movement, and it may result in poor control performance. In this research, we propose a vibrotactile stimulation system to provide the feedback of ankle joint position, and validate the necessity of combining it with volitional myoelectric control to achieve improved control performance. The stimulation system is wearable and consists of six vibrators. Three of the vibrators are placed on the anterior side of the thigh and the other three on the posterior side of the thigh. To explore the potential of applying the proposed vibrotactile feedback system for prosthetic ankle control, eight able-bodied subjects and two transtibial amputee subjects (TT1 and TT2) were recruited in this research, and several experiments were designed to investigate subjects' sensitivities to discrete and continuous vibration stimulations applied on the thigh. Then, we proposed a stimulation controller to produce different stimulation patterns according to current ankle angle. Amputee subjects were asked to control a virtual ankle displayed on the computer screen to reach different target ankle angles with a myoelectric controller, and control performances under different feedback conditions were compared. Experimental results indicated that subjects were more sensitive to stimulation position changes (identification accuracies were 96.39 ± 0.86, 91.11, and 93.89% for able-bodied subjects, TT1, and TT2, respectively) than stimulation amplitude changes (identification accuracies were 89.89 ± 2.40, 87.04, and 85.19% for able-bodied subjects, TT1, and TT2, respectively). Response times of able-bodied subjects, TT1, and TT2 to stimulation pattern changes were 0.47 ± 0.02 s, 0.53 s, and 0.48 s, respectively. Furthermore, for both TT1 and TT2, the absolute error of virtual ankle control reduced by about 50% with the addition of vibrotactile feedback. These results suggest that it is promising to apply the vibrotactile feedback system for the control of robotic transtibial prostheses.
Keywords: human-centered closed-loop control; position control; robotic transtibial prostheses; vibrotactile feedback; vibrotactile stimulation; volitional myoelectric control.
Figures
References
-
- Alahakone A. U., Senanayake S. M. N. A., Arosha M. N. (2010). A real-time system with assistive feedback for postural control in rehabilitation. IEEE/ASME Trans. Mechatron. 15, 226–233. 10.1109/TMECH.2010.2041030 - DOI
-
- Au S. K., Bonato P., Herr H. (2005). “An EMG-position controlled system for an active ankle-foot prosthesis: an initial experimental study,” in 2005 9th IEEE International Conference on Rehabilitation Robotics (ICORR) (Chicago, IL: IEEE), 375–379.
-
- Au S. K., Weber J., Herr H. (2009). Powered ankle-foot prosthesis improves walking metabolic economy. IEEE Trans. Robot. 25, 51–66. 10.1109/TRO.2008.2008747 - DOI
-
- Bamberg S. J. M., Carson R. J., Stoddard G., Dyer P. S., Webster J. B. (2010). The lower extremity ambulation feedback system for analysis of gait asymmetries: preliminary design and validation results. J. Prosthet. Orthot. 22, 31–36. 10.1097/JPO.0b013e3181ccc065 - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources