

Autonomous Soft Robotic Fish Capable of Escape Maneuvers Using Fluidic Elastomer Actuators
- PMID: 27625912
- PMCID: PMC4997624
- DOI: 10.1089/soro.2013.0009
Autonomous Soft Robotic Fish Capable of Escape Maneuvers Using Fluidic Elastomer Actuators
Abstract
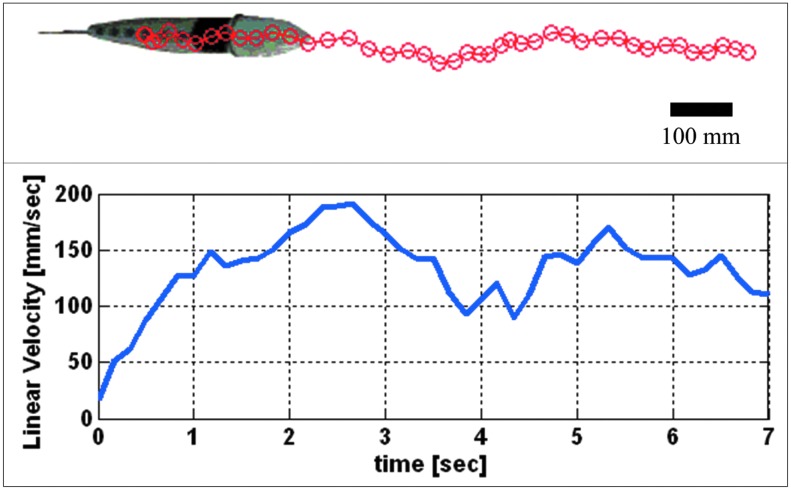
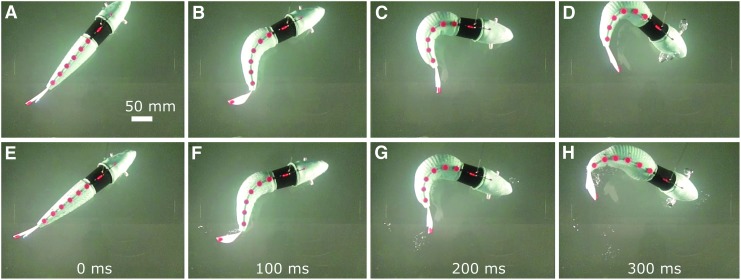
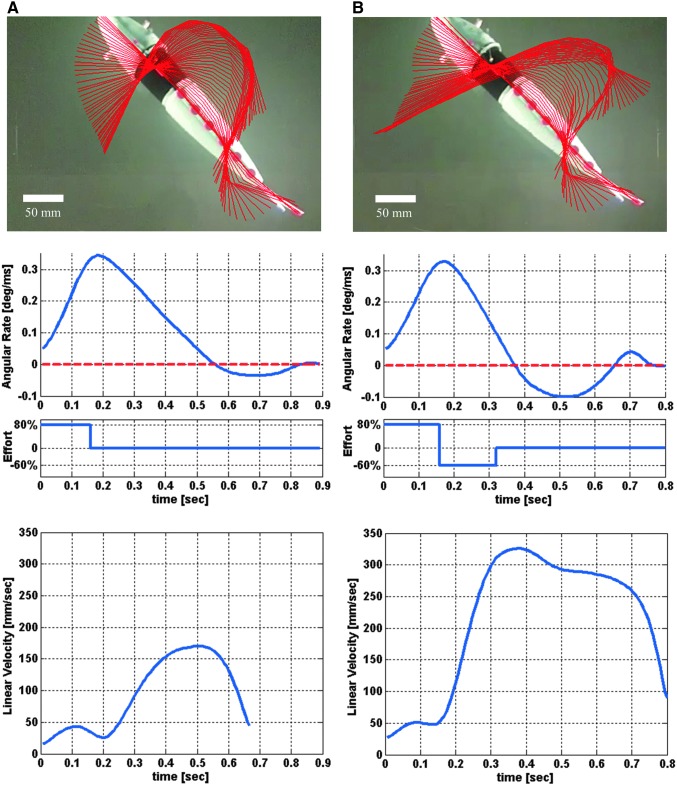
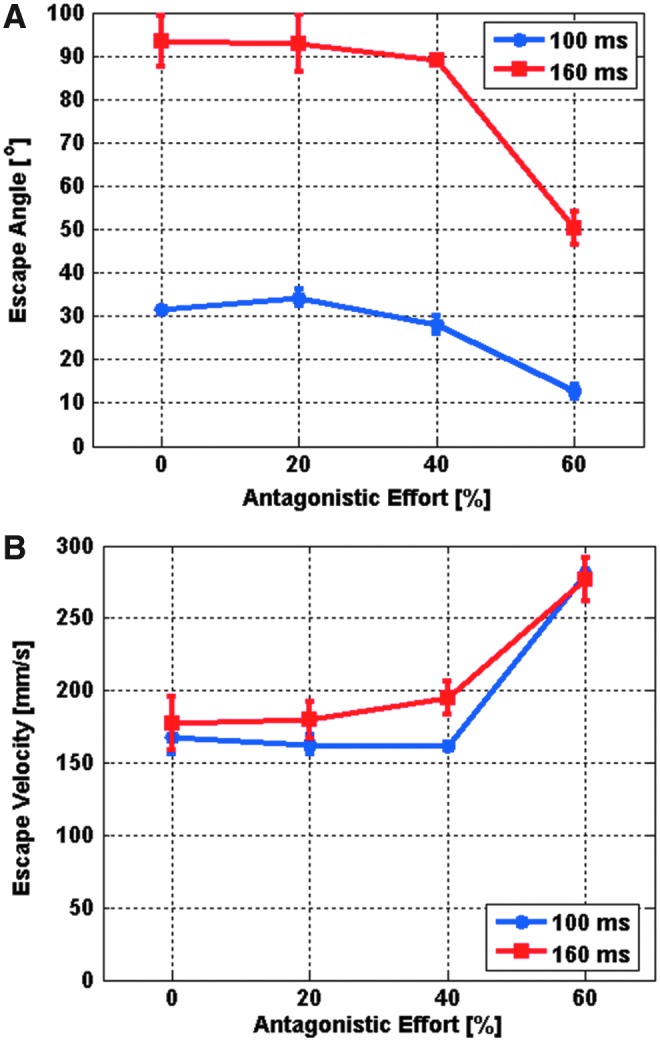
In this work we describe an autonomous soft-bodied robot that is both self-contained and capable of rapid, continuum-body motion. We detail the design, modeling, fabrication, and control of the soft fish, focusing on enabling the robot to perform rapid escape responses. The robot employs a compliant body with embedded actuators emulating the slender anatomical form of a fish. In addition, the robot has a novel fluidic actuation system that drives body motion and has all the subsystems of a traditional robot onboard: power, actuation, processing, and control. At the core of the fish's soft body is an array of fluidic elastomer actuators. We design the fish to emulate escape responses in addition to forward swimming because such maneuvers require rapid body accelerations and continuum-body motion. These maneuvers showcase the performance capabilities of this self-contained robot. The kinematics and controllability of the robot during simulated escape response maneuvers are analyzed and compared with studies on biological fish. We show that during escape responses, the soft-bodied robot has similar input-output relationships to those observed in biological fish. The major implication of this work is that we show soft robots can be both self-contained and capable of rapid body motion.
Figures


References
-
- Domenici P, Blake RW. The kinematics and performance of fish fast-start swimming. J Exp Biol 1997;200:1165–1178 - PubMed
-
- Borazjani I, Sotiropoulos F, Tytell ED, Lauder GV. Hydrodynamics of the bluegill sunfish C-start escape response: three-dimensional simulations and comparison with experimental data. J Exp Biol 2012;215:671–684 - PubMed
-
- Wakeling JM, Johnston IA. Body bending during fast-starts in fish can be explained in terms of muscle torque and hydrodynamic resistance. J Exp Biol 1999;202:675–682 - PubMed
-
- Jayne BC, Lauder GV. Red and white muscle activity and kinematics of the escape response of the bluegill sunfish during swimming. J Comp Physiol A 1993;173:495–508
-
- Webb PW, Skadsen JM. Strike tactics of Esox. Can J Zool 1980;58:1462–1469 - PubMed
LinkOut - more resources
Full Text Sources
Other Literature Sources
